
|
Take heed to this text  |
Robots, and specifically industrial robots, are programmed to carry out sure capabilities. The Robotic Working System (ROS) is a very fashionable framework that facilitates the asynchronous coordination between a robotic and different drives and/or gadgets. ROS has been a go-to means to allow the event of superior functionality throughout the robotics sector.
Southwest Analysis Institute (SwRI) and the ROS-I neighborhood usually develop functions in ROS 2 , the successor to ROS 1. In lots of instances, notably the place legacy utility code is utilized bridging again to ROS 1 remains to be quite common, and one of many challenges in supporting the adoption of ROS for trade. This submit doesn’t purpose to elucidate ROS, or any of the journey to migrating to ROS 2 intimately, but when as a reference, I invite you to learn the next blogs by my colleagues, and our companions at Open Robotics/Open Supply Robotics Basis.
Giving an previous robotic a brand new objective
Robots have been manufactured because the Fifties and, logically, over time there are newer variations with higher properties and efficiency than their ancestors. And that is the place the query is available in: how will you give the potential to these older however nonetheless purposeful robots?
That is turning into a extra necessary query because the round financial system has gained momentum and understanding of the carbon footprint impression of the manufacture of robots that may be offset by reusing a purposeful robotic. Every robotic has its personal capabilities and limitations and people have to be taken into consideration. Nevertheless, the query of “can I carry new life to this previous robotic?” at all times comes up, and this actual use case got here up just lately right here at SwRI.
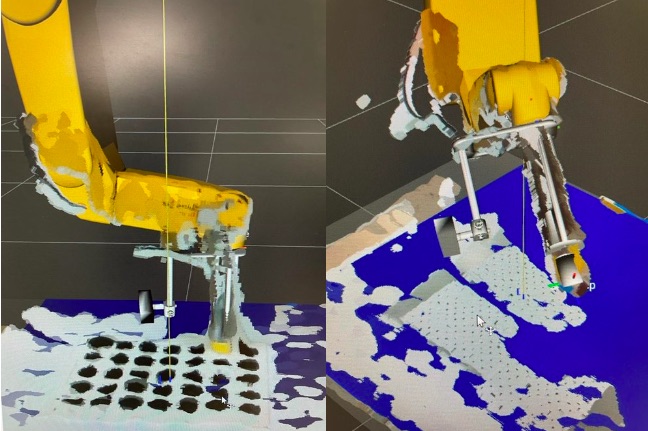
Confirming views of the digital camera to robotic calibration. | Credit score: ROS Industrial
Within the lab, an older Fanuc robotic appeared to be a very good candidate to arrange a system that would exhibit fundamental Scan-N-Plan capabilities in an easy-to-digest manner with this robotic that might be continually obtainable for testing and demonstrations. The actual system was a demo unit from a former integration firm and included an inverted Fanuc robotic manufactured in 2008.
The demo envisioned for this technique can be a fundamental Scan-N-Plan implementation that might find and execute the cleansing of a cell phone display screen. Alongside the best way, we encountered a number of obstacles which can be described beneath.
Driver updates
Let’s discuss first in regards to the drivers. A driver is a software program element that lets the working system and a tool talk with one another. Every robotic has its personal drivers to correctly talk with no matter goes to instruct it on easy methods to transfer. So when talking of drivers, the dealing with of that’s totally different from a pc’s driver to a robotic’s driver. It is because a pc’s driver could be up to date sooner and simpler than that of a robotic.
When machine producers determine errors, they create a driver replace that can right them. In computer systems, you may be notified if a brand new replace is out there, you’ll be able to settle for the replace and the pc will begin updating. However on the earth of commercial robots, together with the Fanuc within the lab right here, it’s essential manually add the driving force and the supporting software program choices to the robotic controller. As soon as the driving force software program and choices are put in, a good quantity of testing is required to know what the modifications you made to the robotic impacted elsewhere within the system. In sure conditions, it’s possible you’ll obtain a robotic with the required choices wanted to facilitate exterior system communication, nonetheless, it’s at all times suggested to test and ensure performance.
With the passing of time, the robotic won’t talk as quick as newer variations of the identical mannequin. So to acquire the perfect outcomes, you’ll want to attempt to replace your communication drivers, if obtainable. The Fanuc robotic comes with a controller that allows you to function it manually, by way of a educate pendant that’s within the consumer’s hand always. It may be set to automated and it’ll do what it has instructed by way of a easy cycle begin. However all security programs have to be purposeful and within the correct state for the system to function.
The speedy place report of the robotic’s state is essential for the pc’s software program (on this case our ROS utility) to know the place the robotic is and whether it is performing the directions accurately. This place is often often called the robotic pose. For robotic arms, the data could be separated by joint states, and your laptop computer will in all probability have a difficulty with the previous robotic as a consequence of reporting these joint states at a slower pace whereas in auto mode than the ROS-based software program on the pc expects. One approach to clear up this sluggish reporting is to replace the drivers or by including the proper configurations to your program to your robotic’s controller, however that’s not at all times doable or possible.
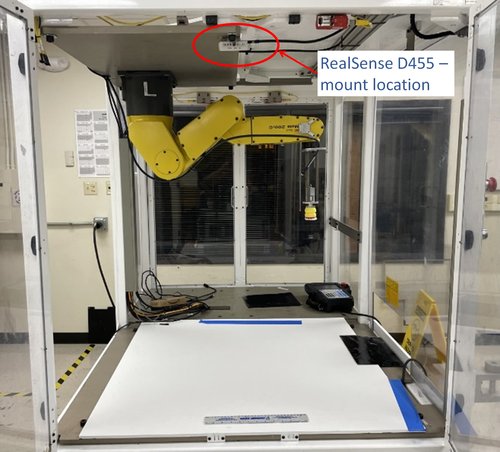
Up to date location of the RGB-D digital camera within the Fanuc cell. | Credit score: ROS-Industrial
One other approach to make the robotic transfer as anticipated is to calibrate the robotic with an RGB-D digital camera. To perform this, you should place the robotic in a strategic place in order that many of the robotic is seen by the digital camera. Then view the projection of the digital camera and examine it to the URDF, which is a file that represents the mannequin of the robotic in simulation. Having each representations, in Rviz for instance, you’ll be able to change the origin of the camera_link, till you see that the projection is aligned with the URDF.
For the Scan n’ Plan utility, the RGB-D digital camera was initially mounted on a part of the robotic’s finish effector. However after we encountered this joint state delay, the digital camera was modified to a strategic place on the roof of the robotic’s enclosure the place it may view the bottom and the Fanuc robotic for calibration to the simulation mannequin as could be seen within the pictures beneath. As well as, we set the robotic to handbook mode, the place the consumer wanted to carry the controller and inform the robotic to begin with the set of directions given by the developed ROS-based Scan-N-Plan generated program.
The place we landed and what I discovered
Whereas not as straightforward as a venture on “This Previous Home,” you’ll be able to educate an previous robotic new tips. It is vitally necessary to know the management platform of your robotic. It might be that an issue shouldn’t be together with your code however with the robotic itself, so it’s at all times good to verify the robotic, related controller and software program work effectively after which search options to allow that new performance throughout the constraints of your obtainable {hardware}.
Although not at all times environment friendly in attending to the answer, older robots can ship worth while you systematically design the method and work throughout the constraints of your {hardware}, profiting from the instruments obtainable, specifically these within the ROS ecosystem.
Concerning the Writer
Bryan Marquez was an engineer intern within the robotics division on the Southwest Analysis Institute.
{kind=link}