

Scientists on the Max Planck Institute for Clever Programs in Stuttgart have developed a magnetically managed smooth medical robotic with a singular, versatile construction impressed by the physique of a pangolin. The robotic is freely movable regardless of built-in exhausting metallic elements. Thus, relying on the magnetic area, it may well adapt its form to have the ability to transfer and might emit warmth when wanted, permitting for functionalities similar to selective cargo transportation and launch in addition to mitigation of bleeding.
Pangolins are fascinating creatures. This animal seems to be like a strolling pine cone, as it’s the solely mammal fully coated with exhausting scales. The scales are fabricated from keratin, identical to our hair and nails. The scales overlap and are straight related to the underlying smooth pores and skin layer. This particular association permits the animals to curve up right into a ball in case of hazard.
Whereas pangolins have many different distinctive options, researchers from the Bodily Intelligence Division on the Max Planck Institute for Clever Programs in Stuttgart, which is led by Prof. Dr. Metin Sitti, had been notably fascinated by how pangolins can curl up their scale-covered our bodies in a flash. They took the animal as a mannequin and developed a versatile robotic made of soppy and exhausting elements that, identical to the animal, turn into a sphere within the blink of a watch – with the extra function that the robotic can emit warmth when wanted.
In a analysis paper revealed in Nature Communications, first writer Ren Hao Quickly and his colleagues current a robotic design that’s not more than two centimeters lengthy and consists of two layers: a smooth layer fabricated from a polymer studded with small magnetic particles and a tough part fabricated from metallic components organized in overlapping layers. Thus, though the robotic is fabricated from stable metallic elements, it’s nonetheless smooth and versatile to be used contained in the human physique.
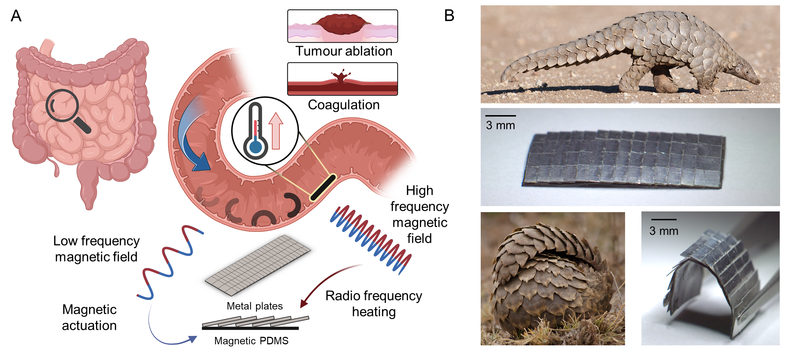
Fig. 1 exhibits the pangolin-inspired untethered magnetic robotic. A Conceptual illustration of the pangolin-inspired robotic working within the small gut. Robotic is actuated with a low-frequency magnetic area and heated remotely with a high-frequency magnetic area. The pangolin’s physique include particular person overlapping exhausting keratin scales. The robotic impressed by this overlapping design is proven on the suitable. Pictures of pangolins used underneath Commonplace licence from Shutterstock.
When the robotic is uncovered to a low-frequency magnetic area, the researchers can roll up the robotic and transfer it forwards and backwards as they need. The metallic components stick out just like the animal’s scales, with out hurting any surrounding tissue. As soon as it’s rolled up, the robotic can transport particles similar to medicines. The imaginative and prescient is that such a small machine will at some point journey via our digestive system, for instance.
Double helpful: freely movable and sizzling
When the robotic is uncovered to a high-frequency magnetic area, it heats as much as over 70oC due to the built-in metallic. Thermal power is utilized in a number of medical procedures, similar to treating thrombosis, stopping bleeding and eradicating tumor tissue. Untethered robots that may transfer freely, though they’re fabricated from exhausting components similar to metallic and may emit warmth, are uncommon. The pangolin robotic is subsequently thought of promising for contemporary drugs. It might at some point attain even the narrowest and most delicate areas within the physique in a minimally invasive and mild approach and emit warmth as wanted. That may be a imaginative and prescient of the longer term. Already in the present day, in a video, the researchers are exhibiting how they will flexibly steer the robotic via animal tissue and synthetic organs.

Max Planck Institute for Clever Programs
‘s aim is to research and perceive the organizing ideas of clever methods and the underlying perception-action-learning loop.
{kind=link}