

Within the earlier put up, we launched process planning in robotics. This subject broadly entails a set of planning strategies which can be domain-independent: That’s, we will design a site which describes the world at some (usually excessive) degree of abstraction, utilizing some modeling language like PDDL. Nonetheless, the planning algorithms themselves might be utilized to any area that may be modeled in that language, and critically, to unravel any legitimate drawback specification inside that area.
The important thing takeaway of the final put up was that process planning is finally search. These search issues are sometimes difficult and develop exponentially with the scale of the issue, so it’s no shock that process planning is usually symbolic: There are comparatively few potential actions to select from, with a comparatively small set of finite parameters. In any other case, search is prohibitively costly even within the face of intelligent algorithms and heuristics.
Bridging the hole between this summary planning area and the true world, which we deeply care about in robotics, is tough. In our instance of a cellular robotic navigating a family surroundings, this would possibly look as follows: Provided that we all know two rooms are linked, a plan that takes our robotic from room A to room B is assured to execute efficiently. In fact, this isn’t essentially true. We’d provide you with a wonderfully legitimate summary plan, however then fail to generate a dynamically possible movement plan by way of a slender hallway, or fail to execute a wonderfully legitimate movement plan on our actual robotic {hardware}.
That is the place Activity and Movement Planning (TAMP) is available in. What if our planner spends extra effort deliberating about extra concrete facets of a plan earlier than executing it? This presents a key tradeoff in additional up-front computation, however a decrease danger of failing at runtime. On this put up we are going to discover a number of issues that differentiate TAMP from “plain” process planning, and dive into some detailed examples with the pyrobosim and PDDLStream software program instruments.
Some motivating examples
Earlier than we formalize TAMP additional, let’s contemplate some tough examples you would possibly encounter with purely symbolic planning in robotics purposes.
On this first instance, our aim is to choose up an apple. In purely symbolic planning the place all actions have the identical value, there isn’t a distinction in navigating to table0 and table1, each of which have apples. Nonetheless, you’ll discover that table0 is in an unreachable location. Moreover, if we determine to embed navigation actions with a heuristic value similar to straight-line distance from the start line, our heuristic beneath will choose table0 as a result of it’s nearer to the robotic’s beginning place than table1.
It wouldn’t be till we attempt to refine our plan — for instance, utilizing a movement planner to seek for a sound path to table0 within the unreachable room — that we’d fail, must replace our planning area to one way or the other flag that main_room and unreachable are disconnected, after which replan with this new info.
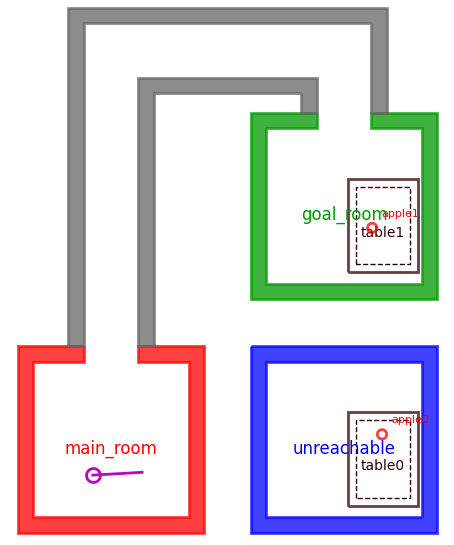
Pathological process planning instance for goal-directed navigation.
Each table0 and table1 can result in fixing the aim specification of holding an apple, however table0 is totally unreachable.
On this second instance, we need to place a banana on a desk. As with the earlier instance, we may select to put this object on both desk0 or desk1. Nonetheless, within the absence of extra info — and particularly if we proceed to deal with close by areas as decrease value — we could plan to put banana0 on desk0 and fail to execute at runtime due to the opposite obstacles.
Right here, some various options would come with putting banana0 on desk1, or transferring one of many different objects (water0 or water1) out of the best way to allow banana0 to suit on desk0. Both means, we’d like some notion of collision checking to allow our planner to eradicate the seemingly optimum, however in follow infeasible, plan of merely putting the thing on desk0.
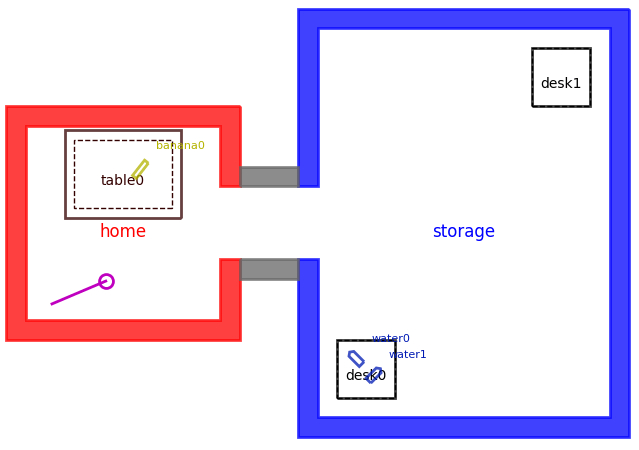
Pathological process planning instance for object manipulation.
Putting banana0 on both desk0 or desk1 will fulfill the aim, however desk0 has different objects that will result in collisions. So, banana0 should both positioned on desk1, or the objects should be rearranged and/or moved elsewhere to permit banana0 to suit on desk0.
In each circumstances, what we’re lacking from our purely symbolic process planner is the power to contemplate the feasibility of summary actions earlier than spitting out a plan and hoping for the most effective. Particularly for embodied brokers similar to robots, which transfer within the bodily world, symbolic plans should be made concrete by way of movement planning. As seen in these two examples, what if our process planner additionally required the existence of a selected path to maneuver between two areas, or a selected pose for putting objects in a cluttered area?
What’s Activity and Movement Planning?
In our examples, the core situation is that if our process planning area is just too summary, a seemingly legitimate plan is prone to fail down the road after we name a very decoupled movement planner to attempt execute some portion of that plan. So, process and movement planning is strictly as its identify states — collectively fascinated about duties and movement in a single planner. As Garrett et al. put it of their 2020 survey paper, “TAMP truly lies between discrete “high-level” process planning and steady “low-level” movement planning”.
Nonetheless, there may be no free lunch. When contemplating all of the wonderful particulars up entrance in deliberative planning, search turns into costly in a short time. In symbolic planning, an motion could have a discrete, finite listing of potential targets (let’s say someplace round 5-10), so it could be cheap to exhaustively search over these and discover the one parameter that’s optimum in line with our mannequin. Once we begin fascinated about detailed movement plans which have a steady parameter area spanning infinite potential options, this turns into intractable. So, a number of approaches to TAMP will apply sampling-based strategies to make planning work in steady motion areas.
One other means to make sure TAMP is sensible is to leverage hierarchy. One widespread approach for breaking down symbolic planning into manageable items is Hierarchical Activity Networks (HTNs). In these 2012 lecture slides, Nilufer Onder mentions “It could be a waste of time to assemble plans from particular person operators. Utilizing the built-in hierarchy helps escape from exponential explosion.” An instance of hierarchical planning is proven within the diagram beneath. Utilizing this diagram, you possibly can discover the advantages of hierarchy; for instance, this planner would by no means must even contemplate learn how to open a door if the summary plan didn’t require taking place the hallway.
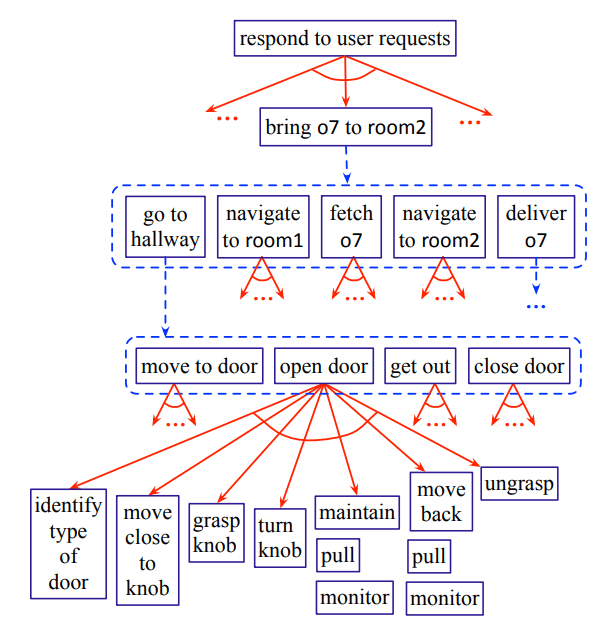
An instance of hierarchical planning for a robotic, the place high-level, or summary, plans for a robotic might be refined into lower-level, or concrete, actions.
Supply: Automated Planning and Performing (2016)
Hierarchical planning is nice in that it helps prune infeasible plans earlier than spending time producing detailed, low-level plans. Nonetheless, on this area the legendary downward refinement property is usually cited. To immediately quote the 1991 paper by Bacchus and Yang, this property states that “given {that a} concrete-level resolution exists, each summary resolution might be refined to a concrete-level resolution with out backtracking throughout summary ranges”. This isn’t at all times (and I might argue hardly ever) achievable in robotics, so backtracking in hierarchical planning is essentially unavoidable.
To this finish, one other technique behind TAMP has to do with dedication in sampling parameters throughout search. Within the literature, you will notice many equal phrases thrown round, however I discover the principle distinction is between the next methods:
- Early-commitment (or binding) methods will pattern motion parameters from steady area earlier than search, successfully changing the issue to a purely discrete process planning drawback.
- Least-commitment (or optimistic) methods will as an alternative provide you with a purely symbolic plan skeleton. If that skeleton is possible, then the required parameter placeholders are stuffed by sampling.
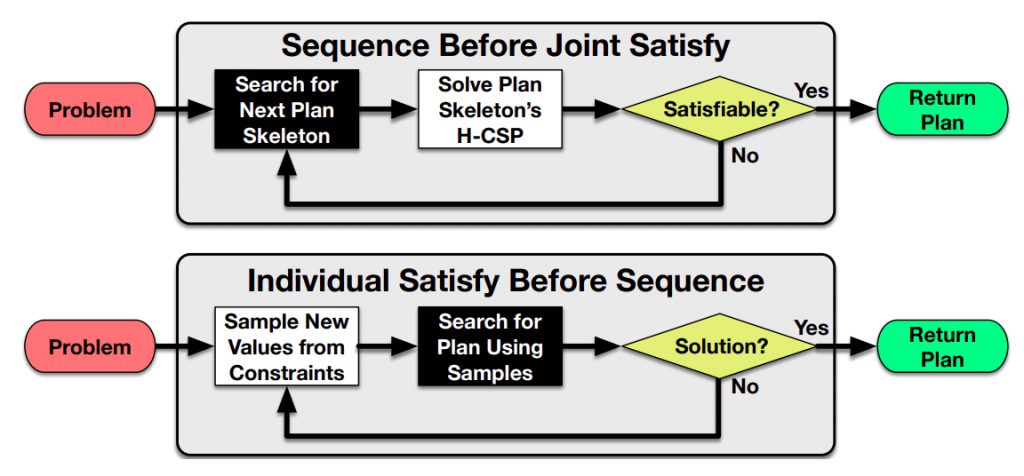
Flowcharts representing two excessive types of sampling-based TAMP.
*H-CSP = hybrid constraint satisfaction drawback
Supply: Garrett et al. (2020), Built-in Activity and Movement Planning
Each methods have benefits and downsides, and in follow trendy TAMP strategies will mix them indirectly that works for the kinds of planning domains and issues being thought of. Additionally, notice that within the diagram above each methods have a loop again to the start when an answer isn’t discovered; so backtracking stays an unavoidable a part of planning.
One key paper that demonstrated the steadiness of symbolic search and sampling was Sampling-based Movement and Symbolic Motion Planner (SMAP) by Plaku and Hager in 2010. Across the similar time, in 2011, Leslie Kaelbling and Tomás Lozano-Pérez offered Hierarchical Planning within the Now (HPN), which mixed hierarchy and sampling-based strategies for TAMP. Nonetheless, the authors themselves admitted the sampling half left one thing to be desired. There’s a nice quote on this paper which foreshadows a number of the different work that will come out of their lab:
“As a result of our domains are infinite, we can’t contemplate all instantiations of the operations. Our present implementation of suggesters solely considers a small variety of potential instantiations of the operations. We may get well the comparatively weak properties of probabilistic completeness by having the suggesters be mills of an infinite stream of samples, and managing the search as a non-deterministic program over these streams.”
– Leslie pack kaelbling and Tomás Lozano-Pérez (2011), Hierarchical planning within the now.
Straight following this quote is the work their scholar Caelan Garrett took on — first within the creation of STRIPStream in 2017 after which PDDLStream in 2018. The astute reader may have observed that PDDLStream is the precise software program utilized in these weblog posts, so take this “literature evaluation” with this bias in thoughts, and maintain studying if you wish to be taught extra about TAMP with this particular software.
If you wish to know extra about TAMP usually, I’ll refer you to 2 latest survey papers that I discovered helpful:
Cell robotic instance, revisited
For example the advantages of built-in TAMP, we’ll proceed the identical cellular robotics instance from the earlier put up. On this drawback,
- The robotic’s aim is to put the apple on the desk.
- Navigation now requires developing with a aim pose (which is a steady parameter), as effectively the precise path from begin to aim. For this instance, we’re utilizing a Quickly-exploring Random Tree (RRT), however you would swap for some other path-finding algorithm.
- Putting an object now requires sampling a sound pose that’s inside the location floor polygon and doesn’t collide with different objects on that floor.
As you learn the next listing explaining this drawback, ensure you scroll by way of the slideshow beneath to get a visible illustration.
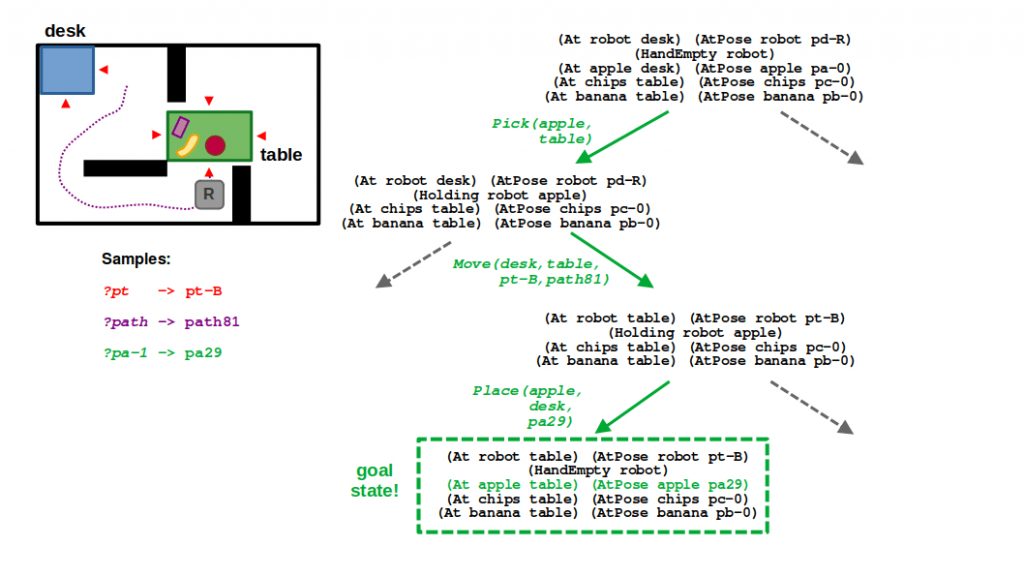
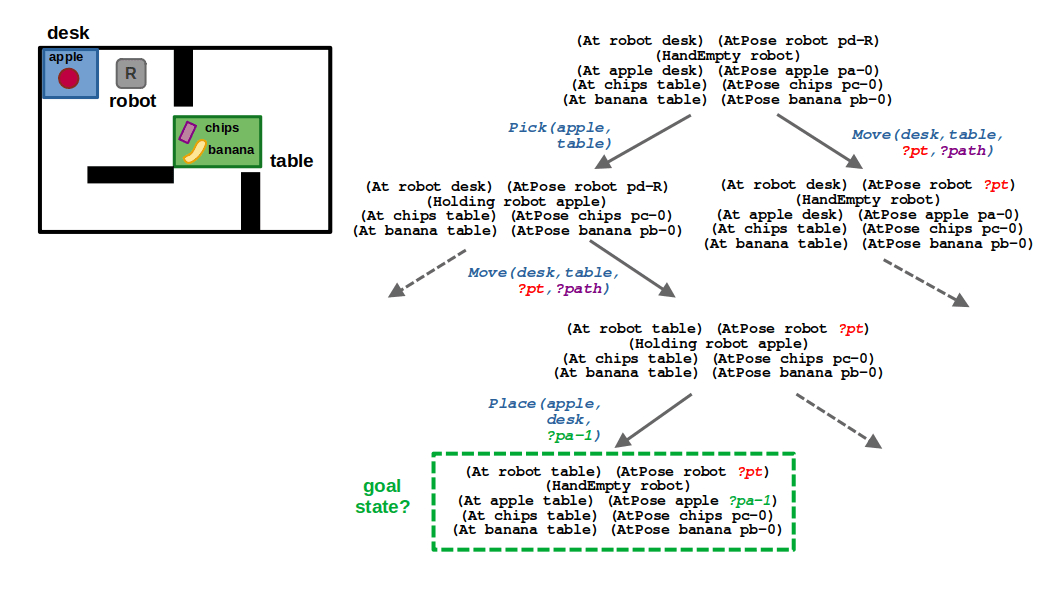
STEP 1: Trying on the state of the world, you possibly can see how a purely symbolic process planner would output a comparatively easy plan: decide the apple, transfer to the desk, and place the apple on the desk. Within the context of TAMP, this now represents a plan skeleton which a number of parameters which can be but to be stuffed — particularly,
- ?pt is the pose of the robotic when navigating to the desk
- ?path is the precise output of our movement planner to get to ?pt
- ?pa-1 is the brand new pose of the apple when positioned on the desk (which follows from its preliminary pose ?pa-0)
STEP 2: To make the issue slightly easier, we made it such that each location has a discrete, finite set of potential navigation areas similar to the perimeters of its polygon. So wanting on the desk location, you see there are 4 potential navigation poses pt-T, pt-B, pt-L, and pt-R similar to the highest, backside, left, and proper sides, respectively. Since this set of areas is comparatively small, we will pattern these parameters up entrance (or eagerly) firstly of search.
STEP 3: Our transfer motion can now have completely different instantiations for the aim pose ?pt which can be enumerated throughout search. That is in distinction with the ?path argument, which have to be sampled by calling our RRT planner. We don’t need to do that eagerly as a result of the area of paths is steady, so we choose to defer sampling of this parameter. If our motion has a value related to the size of a path, we may think about that the lowest-cost motion can be to navigate to the left facet of the desk (pt-L), and a few randomly sampled path (path42) could describe how we get there.
STEP 4: Subsequent comes the place motion, which now should embrace a sound collision-free pose for the apple on the desk. Due to how we arrange our drawback, our robotic can’t discover a legitimate placement pose when approaching from the left facet of the desk. So, we should backtrack.
STEP 5: After backtracking, we have to discover another navigation pose for the desk (?pt). Given our surroundings, the one different possible location is the underside facet of the desk (pt-b), because the partitions block the robotic from the highest and proper sides and it could be not possible to discover a legitimate path with our RRT. Nonetheless, when the robotic is on the backside facet of the desk, it could actually additionally pattern a sound placement pose! In our instance, the placeholder ?pa-1 is due to this fact glad with some randomly sampled pose pa29.
STEP 6: … And there you’ve got it! A sound plan that defines a sequence of symbolic actions (decide, transfer, place) together with the required navigation pose, path to that pose, and placement location for the apple. It’s not optimum, however it’s probabilistically full!
(1/6) By being optimistic about all the continual parameters associated to movement, we will attain a possible aim state with relative ease.
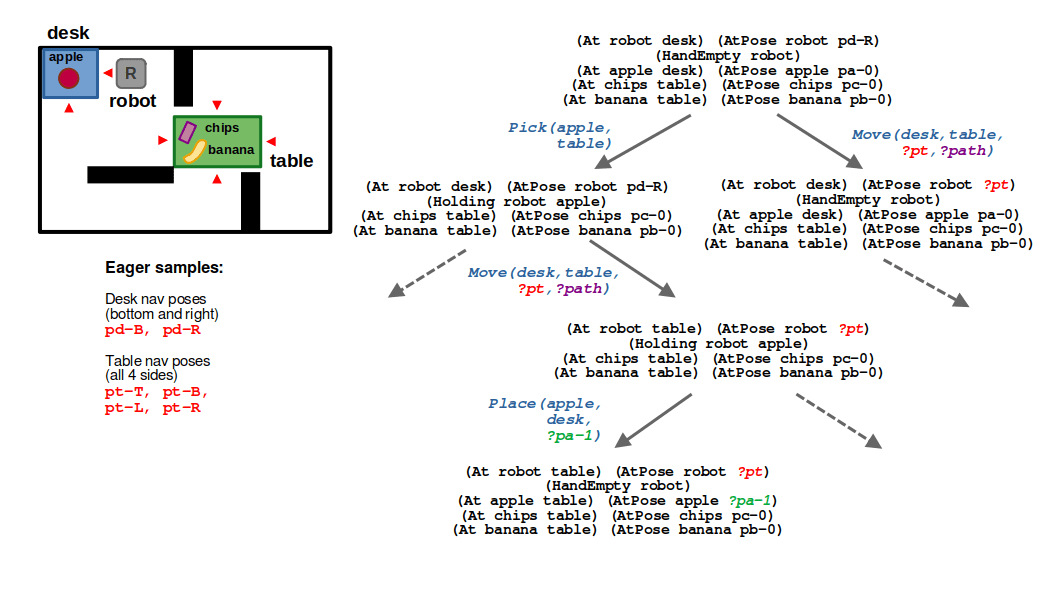
(2/6) Because the navigation poses across the desk and the desk are finite, we will pattern them eagerly; that’s, we enumerate all choices up entrance in planning.
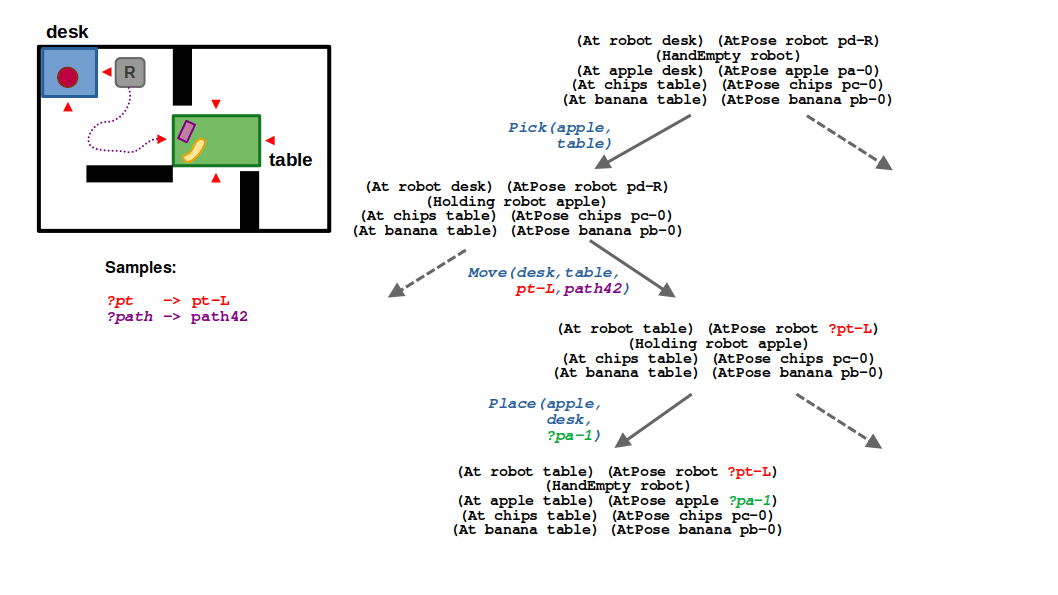
(3/6) As soon as we decide to a navigation pose across the desk, we will proceed filling in our plan by sampling a possible trajectory from the robotic’s present pose to the goal pose on the desk.
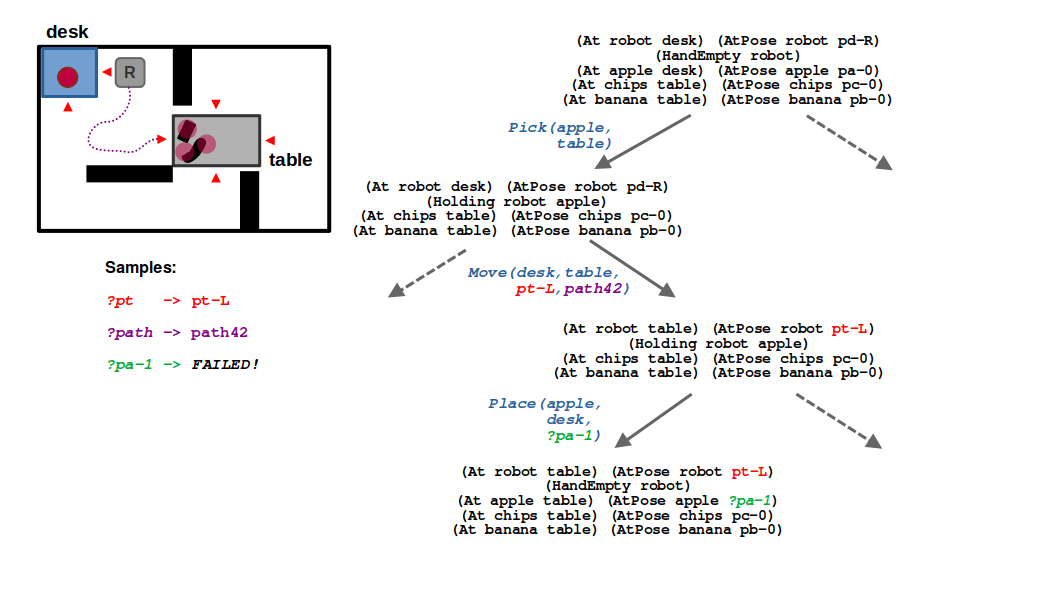
(4/6) Subsequent, we have to pattern a placement pose for the apple. Suppose on this case we fail to pattern a collision-free resolution based mostly on the robotic’s present location.
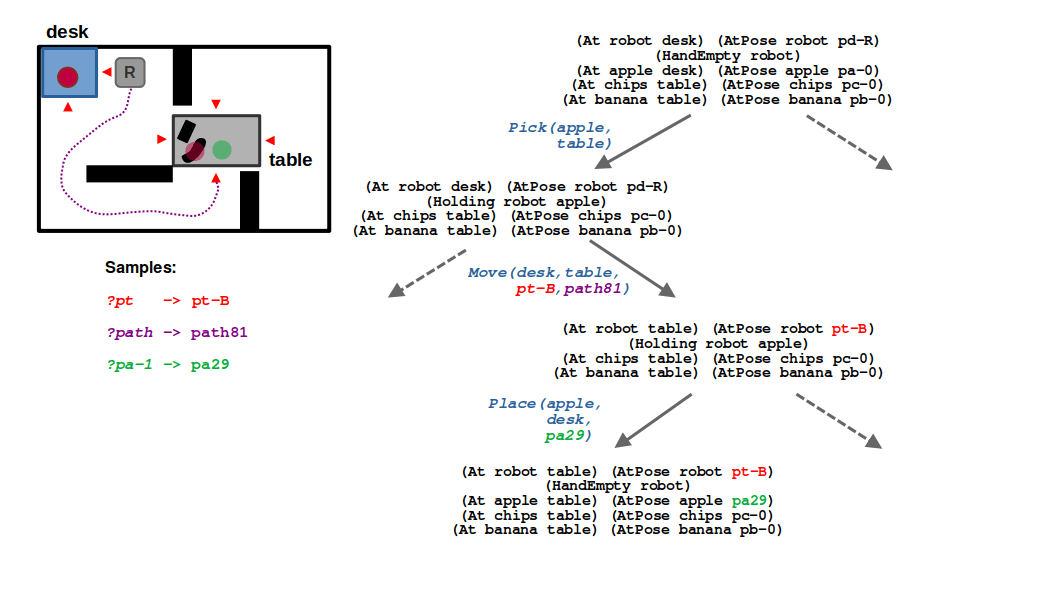
(5/6) This implies we have to backtrack and contemplate a unique navigation pose, thereby a unique movement plan to this new pose.
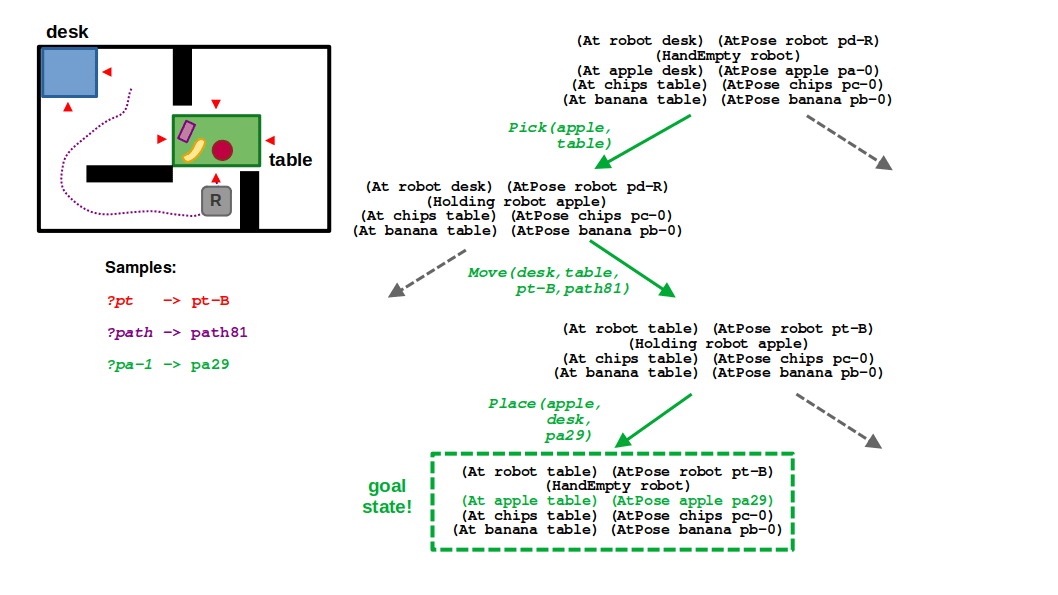
(6/6) From this new pose, regardless that the trajectory is longer and due to this fact higher-cost, we will pattern a sound placement pose for the apple and eventually full our process and movement plan.
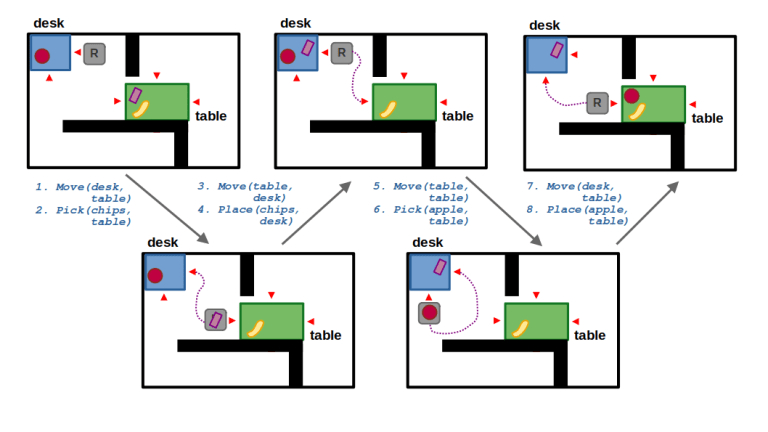
Now, suppose we alter our surroundings such that we will solely strategy the desk from the left facet, so there isn’t a option to immediately discover a legitimate placement pose for the apple. Utilizing the identical planner, we must always finally converge on a process and movement plan that rearranges the objects world — that’s, it requires transferring one of many different objects on the desk to make room for the apple.
Implementing TAMP with PDDLStream
We’ll now revisit our pathological examples from the start of this put up. To do that, we are going to use PDDLStream for planning and pyrobosim as a easy simulation platform. For fast background on PDDLStream, you could discuss with this video.
The important thing concept behind PDDLStream is that it extends PDDL with a notion of streams (keep in mind the sooner quote from the Hierarchical Planning within the Now paper?). Streams are generic, user-defined Python features that pattern steady parameters similar to a sound pattern certifies that stream and gives any vital predicates that (often) act as preconditions for actions. Additionally, PDDLStream has an adaptive approach that balances exploration (looking for discrete process plans) vs. exploitation (sampling to fill in steady parameters).
Purpose-directed navigation
We are able to use PDDLStream to enhance our transfer motion such that it consists of metric particulars concerning the world. As we noticed in our illustrative instance, we now should issue within the begin and aim pose of our robotic, in addition to a concrete path between these poses.
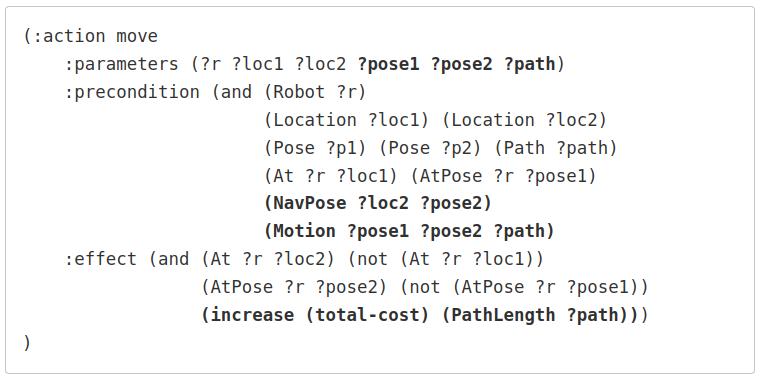
As further preconditions for this motion, we should make sure that:
- The navigation pose is legitimate given the goal location (NavPose)
- There have to be a sound path from the begin to aim pose (Movement)
Moreover, we’re in a position to now use extra real looking prices for our motion by calculating the precise size of our path produced by the RRT! The separate file describing the streams for this motion could look as follows. Right here, the s-navpose stream certifies the NavPose predicate and the s-motion stream certifies the Movement predicate.
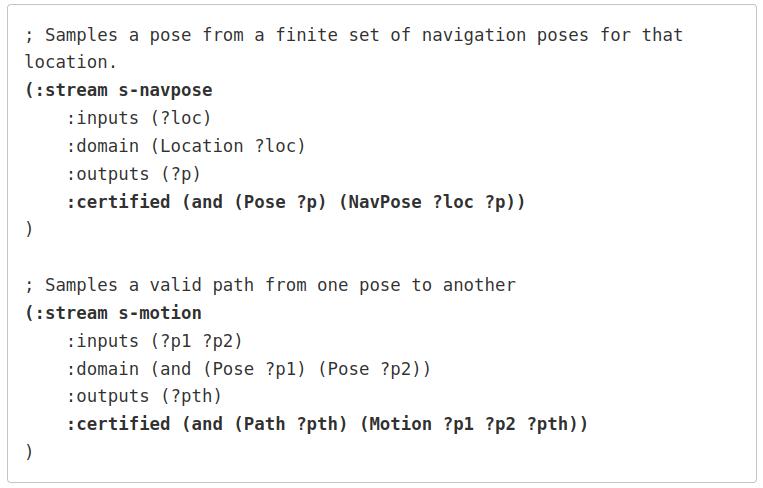
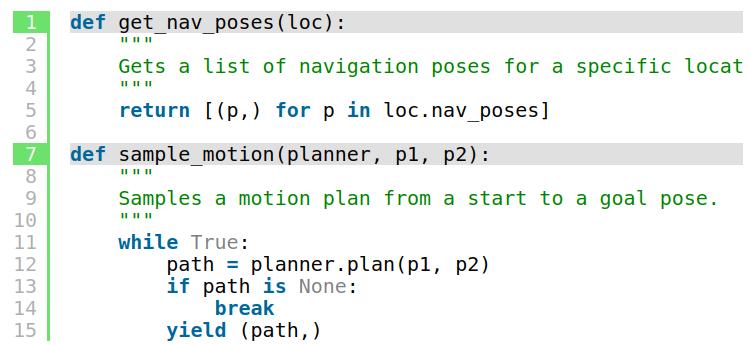
The Python implementations for these features would then look one thing like this. Discover that the get_nav_poses perform returns a finite set of poses, so the output is an easy Python listing. However, sample_motion can constantly spit out paths from our RRT, and it carried out as a generator:
Placing this new area and streams collectively, we will remedy our first pathological instance from the introduction. Within the plan beneath, the robotic will compute a path to the farther away, however reachable room to choose up an apple and fulfill the aim.
Object manipulation
Equally, we will prolong our place motion to now embrace the precise poses of objects on this planet. Particularly,
- The ?placepose argument defines the goal pose of the thing.
- The Placeable predicate is licensed by a s-place stream.
- The IsCollisionFree predicate is definitely a derived predicate that checks particular person collisions between the goal object and all different objects at that location.
- Every particular person collision test is decided by the CollisionFree predicate, which is licensed by a t-collision-free steam.
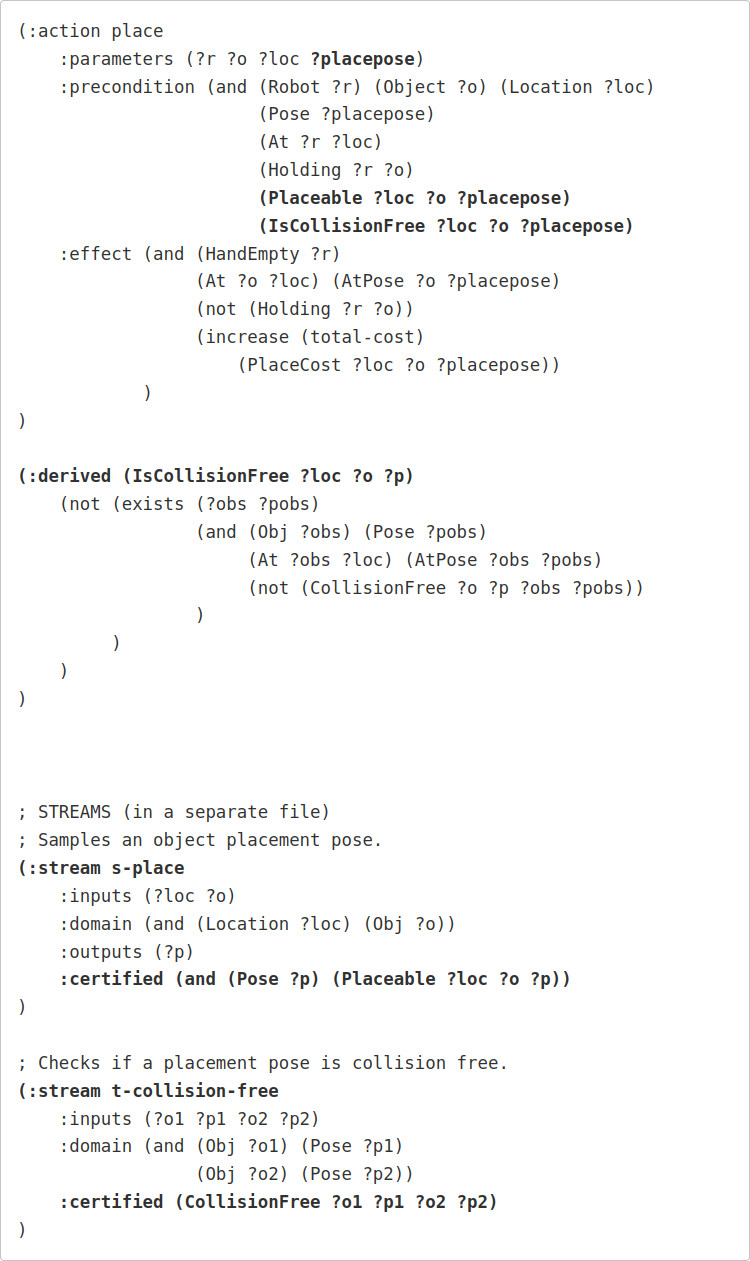
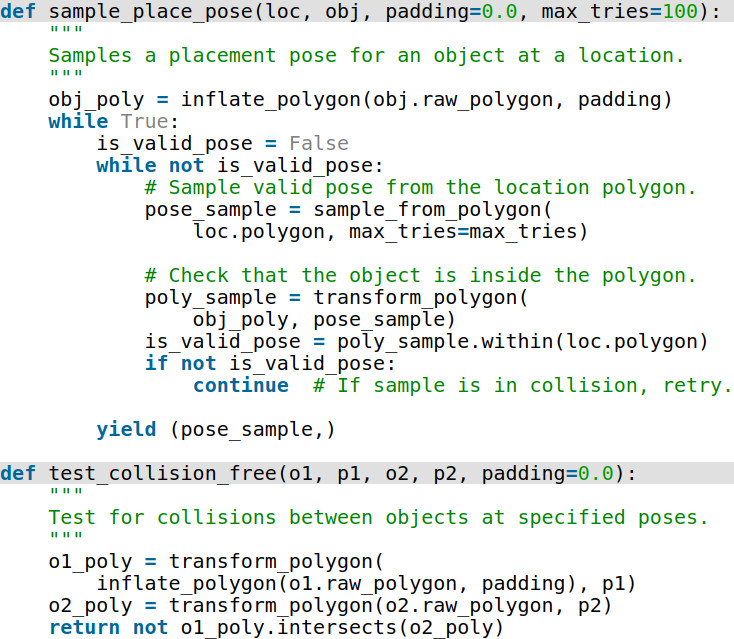
The Python implementation for sampling placement poses and checking for collisions could look as follows. Right here, sample_place_pose is our generator for placement poses, whereas test_collision_free is an easy Boolean (true/false) test.
By increasing our area to motive concerning the feasibility of object placement, we will equally remedy the second pathological instance from the introduction. Within the first video, we now have another location desk1 the place the robotic can place the banana and fulfill the aim.
Within the second video, we take away the choice desk1. The identical process and movement planner then produces an answer that entails selecting up one of many objects on desk0 to make room to later place the banana there.
You may think about extending this to a extra real looking system — that’s, one that’s not a degree robotic and has an precise manipulator — that equally checks the feasibility of a movement plan for selecting and putting objects. Whereas it wasn’t the principle focus of the work, our Energetic Studying of Summary Plan Feasibility work did precisely this with PDDLStream. Particularly, we used RRTs to pattern configuration-space paths for a Franka Emika Panda arm and doing collision-checking utilizing a surrogate mannequin in PyBullet!
Conclusion
On this put up we launched the final idea of process and movement planning (TAMP). In principle, it’s nice to deliberate extra — that’s, actually suppose extra concerning the feasibility of plans all the way down to the metric degree — however with that comes extra planning complexity. Nonetheless, this may repay in that it reduces the chance of failing in the course of executing a plan and having to cease and replan.
We launched 3 common ideas that may make TAMP work in follow:
- Hierarchy, to find out the feasibility of summary plans earlier than planning at a decrease degree of refinement.
- Steady parameter areas, and strategies like sampling to make this tractable.
- Least-commitment methods, to provide you with symbolic plan skeletons earlier than spending time with costly sampling of parameters.
We then dug into PDDLStream as one software for TAMP, which doesn’t do a lot in the best way of hierarchy, however actually tackles steady parameter areas and least-commitment methods for parameter binding. We went by way of a number of examples utilizing pyrobosim, however you possibly can entry the total set of examples within the pyrobosim documentation for TAMP.
The PDDLStream repository has many extra examples that you could take a look at. And, after all, there are a lot of different process and movement planners on the market that target various things — similar to hierarchy with out steady parameters, or factoring in different widespread goals similar to temporal facets and useful resource consumption.
Hope you’ve got loved these posts! If the instruments proven right here provide you with any cool concepts, I might love to listen to about them, so be happy to achieve out.
You may learn the unique article at Roboticseabass.com.

Sebastian Castro
is a Senior Robotics Engineer at PickNik.
{kind=link}