

Rising up in Rhode Island (the Ocean State), I lived very near the water. Over time, I’ve seen the results of sea degree rise and fast erosion. Whole homes and seashores have slowly been consumed by the tide. I’ve witnessed first hand how local weather change is quickly altering the ocean ecosystem. Generally I really feel overwhelmed by the inexorability of local weather change. What can we do within the face of such a worldwide, virtually incomprehensible dilemma? The one approach I can overcome this notion is by committing to doing one thing with my life to assist, even when it’s in a small approach. I feel with such a giant difficulty, the one approach ahead is by beginning small, figuring out one area of interest I can work in, and seeing how I can form my analysis round fixing that problem.
One main problem is fast world ocean temperature rise. When scientists look to make local weather associations utilizing temperature knowledge, they often use fastened temperature loggers connected to buoys or on the ocean flooring. Sadly, this strategy reductions the realm between the ocean’s floor and flooring. Variable ocean situations create microclimates, pockets of the ocean which might be unaffected by normal local weather developments. Scientists have proven that almost all organisms expertise local weather change by way of these microclimates. Fish are vastly affected by this fast improve in temperature as they’ll solely lay eggs in a minimal vary of temperatures. Microclimates are altering temperature with celerity. Therefore, many species can not adapt rapidly sufficient to outlive. At this charge, 60% of fish species might go extinct by 2100.
In fact, fish usually are not the one organisms affected by the fast improve in temperature. Coral within the Nice Barrier Reef can solely survive in a minimal temperature threshold, and as temperature will increase, reefs are experiencing mass coral bleaching. AIMS, the Australian Institute for Marine Science, the federal government company that screens the Nice Barrier Reef, makes use of divers pulled behind boats to file reef observations and acquire knowledge. Sadly, this has led to some casualties as a consequence of shark assaults. They’ve begun deploying giant, virtually seven ft in size, ocean gliders that may mitigate this danger. These robots include a hefty price ticket of $125,000 to $500,000. They’re additionally too giant to navigate parts of the reef.
Our resolution within the Tender Robotics Lab at Worcester Polytechnic Institute is constructing a free-swimming (tetherless), biologically impressed robotic fish, funded partially by the Nationwide Science Basis Way forward for Robots within the Office Analysis and Improvement Program. Our purpose is for the robotic to navigate the advanced atmosphere of the Nice Barrier Reef and file dense three-dimensional temperature knowledge all through the water column. Furthermore, we are going to use non-hazardous and inexpensive materials for the fish’s physique. Since our motivation is to create a device to make use of in local weather analysis, a robotic that’s low-cost and simple to fabricate will improve its effectiveness. Our strategy is in stark distinction to conventional autonomous underwater autos that make the most of propellers which might be noisy and incongruous to underwater life. We selected to imitate the movement of actual fish to cut back the environmental affect of our robotic and allow shut remark of different actual fish.
We’re, after all, not the primary individuals to construct a robotic fish. In 1994, MIT produced the RoboTuna, a completely inflexible fish robotic, and since then, there have been many various iterations of fish robots. Some have been made from absolutely inflexible supplies just like the RoboTuna and used motors that run the caudal tail (rear fin) actuation that powers the fish. Nevertheless, this doesn’t replicate the fluid movement achieved by actual fish as they swim. A potential resolution can be to make use of gentle supplies. Designs utilizing gentle supplies, up up to now, make the most of a silicone, pneumatically or hydraulically actuated tail. Sadly, these robots can not function in tough environments since any cuts or abrasions to the silicone might trigger a leak within the system and result in a complete failure within the actuation of the tail. Different robots have mixed the extra sturdy inflexible supplies, actuated with cables, after which connected a gentle silicone finish that bends with the drive of the water. All these earlier robots are troublesome to fabricate and require institutional data to recreate.

MIT Robotuna and MIT SOFI robots
We’ve got fabricated a 3D printed, cable-actuated wave spring tail constituted of gentle supplies that may drive a small robotic fish. The wave spring provides the robotic its biologically impressed form, however it might probably bend fluidly just like the silicone-based robots and actual fish. The wave springis completely 3D printed from a versatile materials that’s inexpensive and simple to make use of. This materials and methodology creates a really gentle but sturdy robotic, withstands harsh remedy, and runs for tons of of hundreds of cycles with none degradation to any of the robotic’s programs. The robotic units itself aside by being very simple to assemble, with solely a handful of components, most of which will be 3D printed.
The wave spring itself has a biologically impressed design. Reef fish are morphologically numerous however share the same physique form which we emulate with a tapered oval design. The wave spring itself consists of a mesh of diamond-shaped cells that may compress and bend. To limit our robotic to solely lateral bending, we added helps down the dorsal and ventral edges of the wave spring.

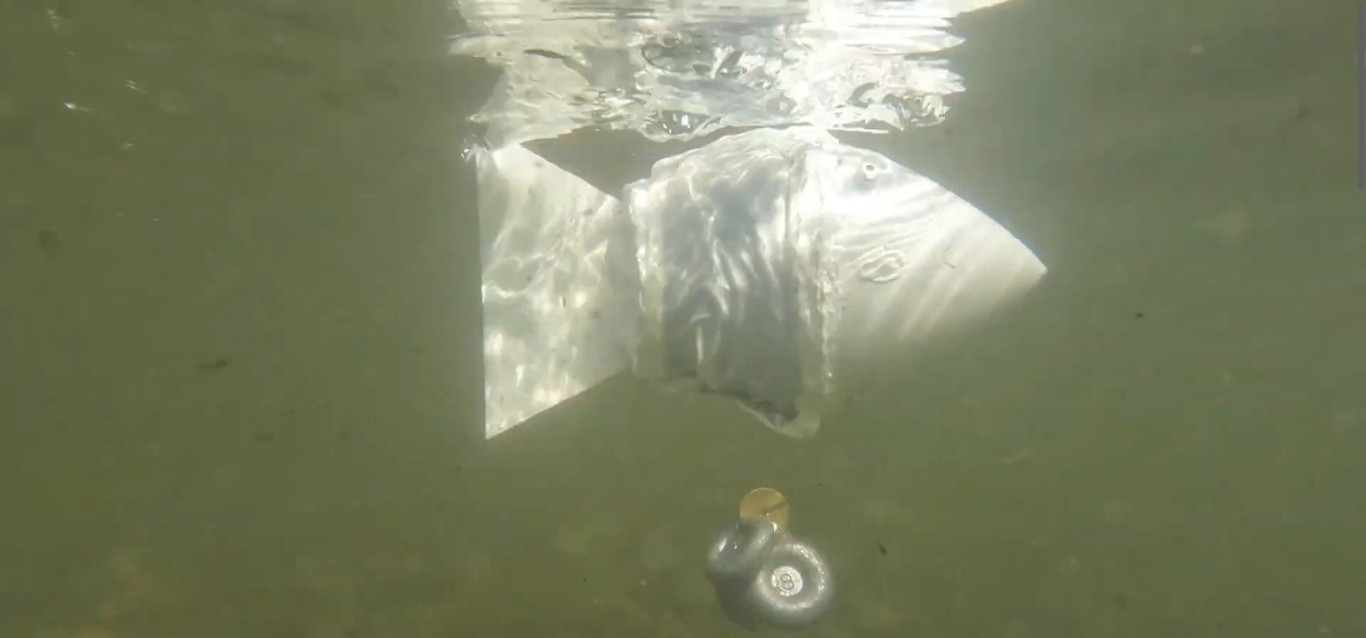
Utilizing this design, we now have efficiently created a robotic fish. The robotic is ready to swim freely in a fish tank, swimming pool, and in a lake. Whereas testing the fish in these environments, we discovered that the velocity and efficiency of our robotic was akin to different fish robots working underneath comparable parameters. With the intention to waterproof the robotic (to guard the electronics required for tetherless swimming), we had so as to add a latex pores and skin. This does improve the manufacturing complexity of the design, so we are going to look to enhance not solely the robotic’s efficiency, but in addition its design to make sure a simplistic but excessive functioning robotic.
Most significantly, we are going to add the sensors required to gather knowledge like temperature, which is crucial to a greater understanding of the oceans’ quickly altering microclimates. It’s essential that we stay targeted on this purpose, because it drives not solely the robotic’s design, however our motivation for why we do that work. Local weather change is the foremost disaster dealing with our world. I encourage everybody to attach their pursuits and work, regardless of the sector, not directly to this difficulty as we’re the one ones who can do one thing about it.
tags: bio-inspired, c-Analysis-Innovation
Robin Corridor
is a PhD candidate from Worcester Polytechnic Institute.
Robin Corridor
is a PhD candidate from Worcester Polytechnic Institute.
{kind=link}