
For those who’ve been topic to my posts on Twitter or LinkedIn, you might have seen that I’ve accomplished no writing within the final 6 months. Moreover the entire… full-time job factor … that is additionally as a result of initially of the yr I made a decision to deal with a bigger coding challenge.
At my earlier job, I stood up a system for job and movement planning (TAMP) utilizing the Toyota Human Assist Robotic (HSR). You may study extra in my 2020 recap put up. Whereas I’m actually in a position to speak about that work, the code itself was closed in two other ways:
- Analysis collaborations with Toyota Analysis Institute (TRI) pertaining to the HSR are in a closed neighborhood, except for some publicly obtainable repositories constructed across the RoboCup@Residence Home Normal Platform League (DSPL).
- The code not particular to the robotic itself was contained in a personal repository in my former group’s group, and moreover is embedded in an enormous monorepo.
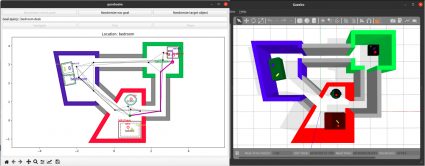
Rewind to 2020: The unique simulation software (left) and a generated Gazebo world with a Toyota HSR (proper).
So I believed, there are some generic utilities right here that may very well be helpful to the neighborhood. What wouldn’t it take to strip out the house service robotics simulation instruments out of that setting and make it obtainable as a standalone package deal? Additionally, how may I squeeze in enhancements and study attention-grabbing issues alongside the way in which?
This put up describes how these utilities turned pyrobosim: A ROS2 enabled 2D cellular robotic simulator for conduct prototyping.
What’s pyrobosim?
At its core, pyrobosim is a straightforward robotic conduct simulator tailor-made for family environments, however helpful to different purposes with related assumptions: shifting, choosing, and putting objects in a 2.5D* world.
* For these unfamiliar, 2.5D usually describes a 2D setting with restricted entry to a 3rd dimension. Within the case of pyrobosim, this implies all navigation occurs in a 2D airplane, however manipulation duties happen at a particular peak above the bottom airplane.
The meant workflow is:
- Use pyrobosim to construct a world and prototype your conduct
- Generate a Gazebo world and run with a higher-fidelity robotic mannequin
- Run on the actual robotic!
Pyrobosim lets you outline worlds made up of entities. These are:
- Robots: Programmable brokers that may act on the world to vary its state.
- Rooms: Polygonal areas that the robotic can navigate, linked by Hallways.
- Areas: Polygonal areas that the robotic can not drive into, however could comprise manipulable objects. Areas comprise one in every of extra Object Spawns. This permits having a number of object spawns in a single entity (for instance, a left and proper countertop).
- Objects: The issues that the robotic can transfer to vary the state of the world.
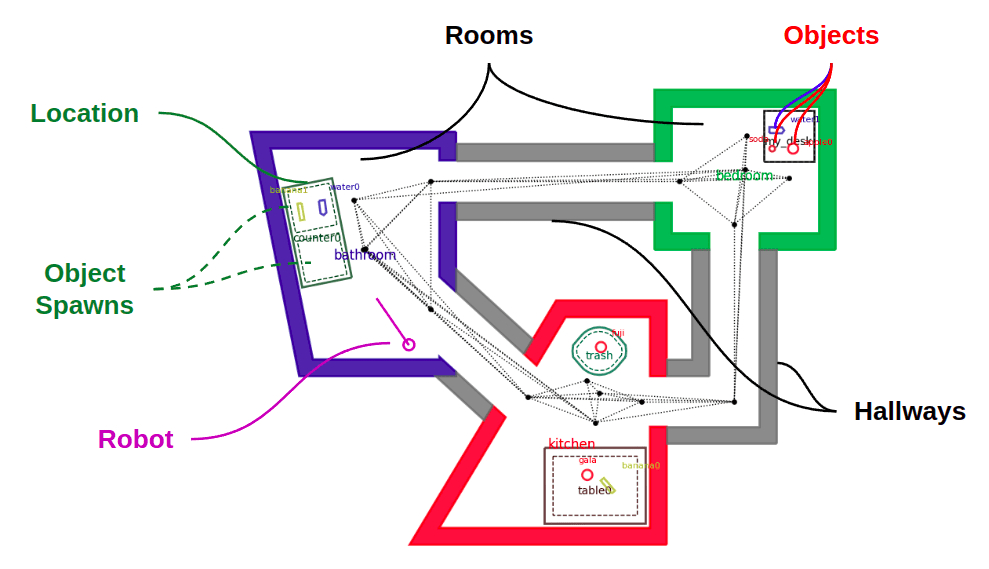
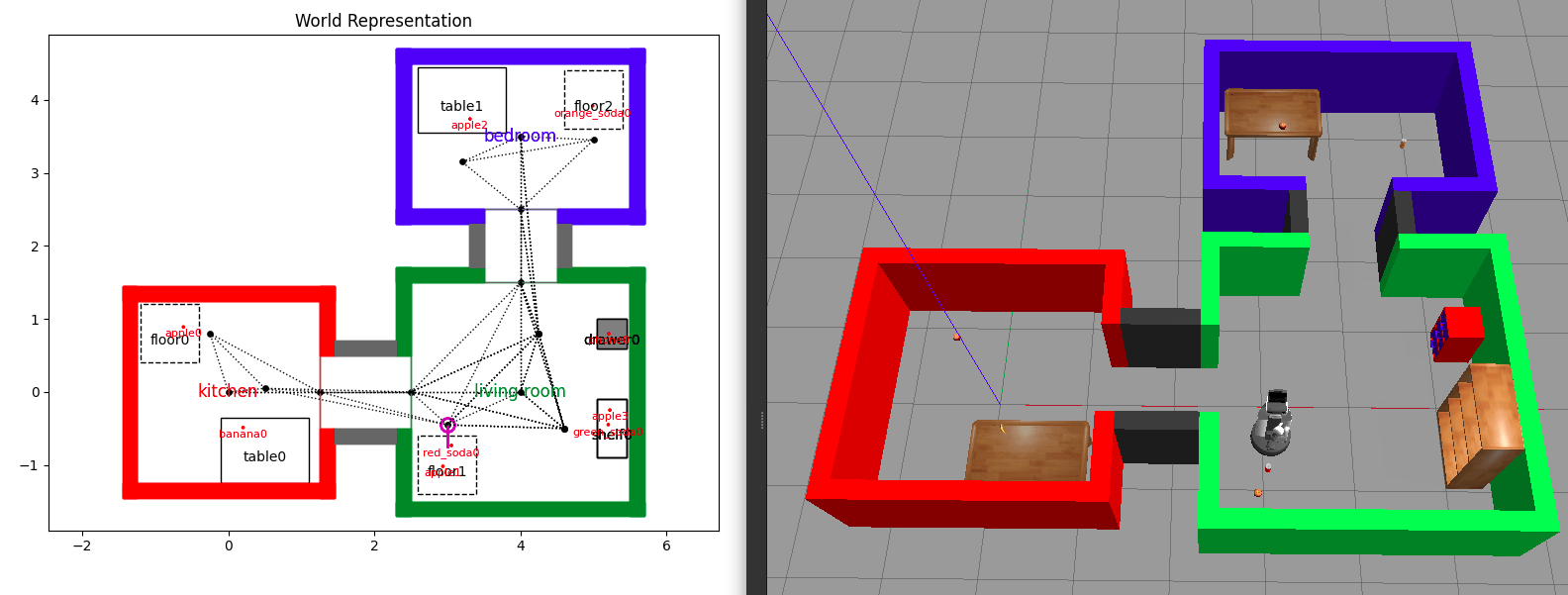
Fundamental entity varieties proven in a pyrobosim world.
Given a static set of rooms, hallways, and areas, a robotic on the planet can then take actions to vary the state of the world. The principle 3 actions carried out are:
- Decide: Take away an object from a location and maintain it.
- Place: Put a held object at a particular location and pose inside that location.
- Navigate: Plan and execute a path to maneuver the robotic from one pose to a different.
As that is primarily a cellular robotic simulator, there’s extra deal with navigation vs. manipulation options. Whereas choosing and putting are idealized, which is why we will get away with a 2.5D world illustration, the concept is that the trail planners and path followers could be swapped out to check completely different navigation capabilities.
One other long-term imaginative and prescient for this software is that the set of actions itself could be expanded. Some random concepts embrace shifting furnishings, opening and shutting doorways, or gaining info in partially observable worlds (for instance, an specific “scan” motion).
Independently of the checklist of doable actions and their parameters, these actions can then be sequenced right into a plan. This plan could be manually specified (“go to A”, “choose up B”, and many others.) or the output of a higher-level job planner which takes in a job specification and outputs a plan that satisfies the specification.

Execution of a pattern motion sequence in pyrobosim.
In abstract: pyrobosim is a software program software the place you’ll be able to transfer an idealized level robotic round a world, choose and place objects, and take a look at job and movement planners earlier than shifting into higher-fidelity settings — whether or not it’s different simulators or an actual robotic.
What’s new?
Taking this code out of its authentic resting spot was removed from a copy-paste train. Whereas sifting by the code, I made a couple of enhancements and design adjustments with modularity in thoughts: ROS vs. no ROS, GUI vs. no GUI, world vs. robotic capabilities, and so forth. I additionally added new options with the egocentric agenda of studying issues I wished to strive… which is the purpose of a enjoyable private facet challenge, proper?
Let’s dive into a couple of key thrusts that made up this preliminary launch of pyrobosim.
1. Consumer expertise
The unique software was carefully tied to a single Matplotlib determine window that had to be open, and generally there have been plenty of shortcuts to simply get the factor to work. On this redesign, I attempted to extra cleanly separate the modeling from the visualization, and properties of the world itself with properties of the robotic agent and the actions it could take on the planet.
I additionally wished to make the GUI itself a bit nicer. After some fast looking out, I discovered this put up that confirmed put a Matplotlib canvas in a PyQT5 GUI, that’s what I went for. For now, I began by including a couple of buttons and edit packing containers that permit interplay with the world. You may write down (or generate) a location title, see how the present path planner and follower work, and choose and place objects when arriving at particular areas.
In tinkering with this new GUI, I discovered quite a lot of bugs with the unique code which resulted in good basic adjustments within the modeling framework. Or, to make it sound fancier, the GUI offered an incredible platform for interactive testing.
The very last thing I did when it comes to usability was present customers the choice of making worlds with out even touching the Python API. Because the libraries of doable areas and objects had been already outlined in YAML, I threw within the skill to writer the world itself in YAML as nicely. So, in idea, you may take one of many canned demo scripts and swap out the paths to three recordsdata (areas, objects, and world) to have a totally completely different instance able to go.
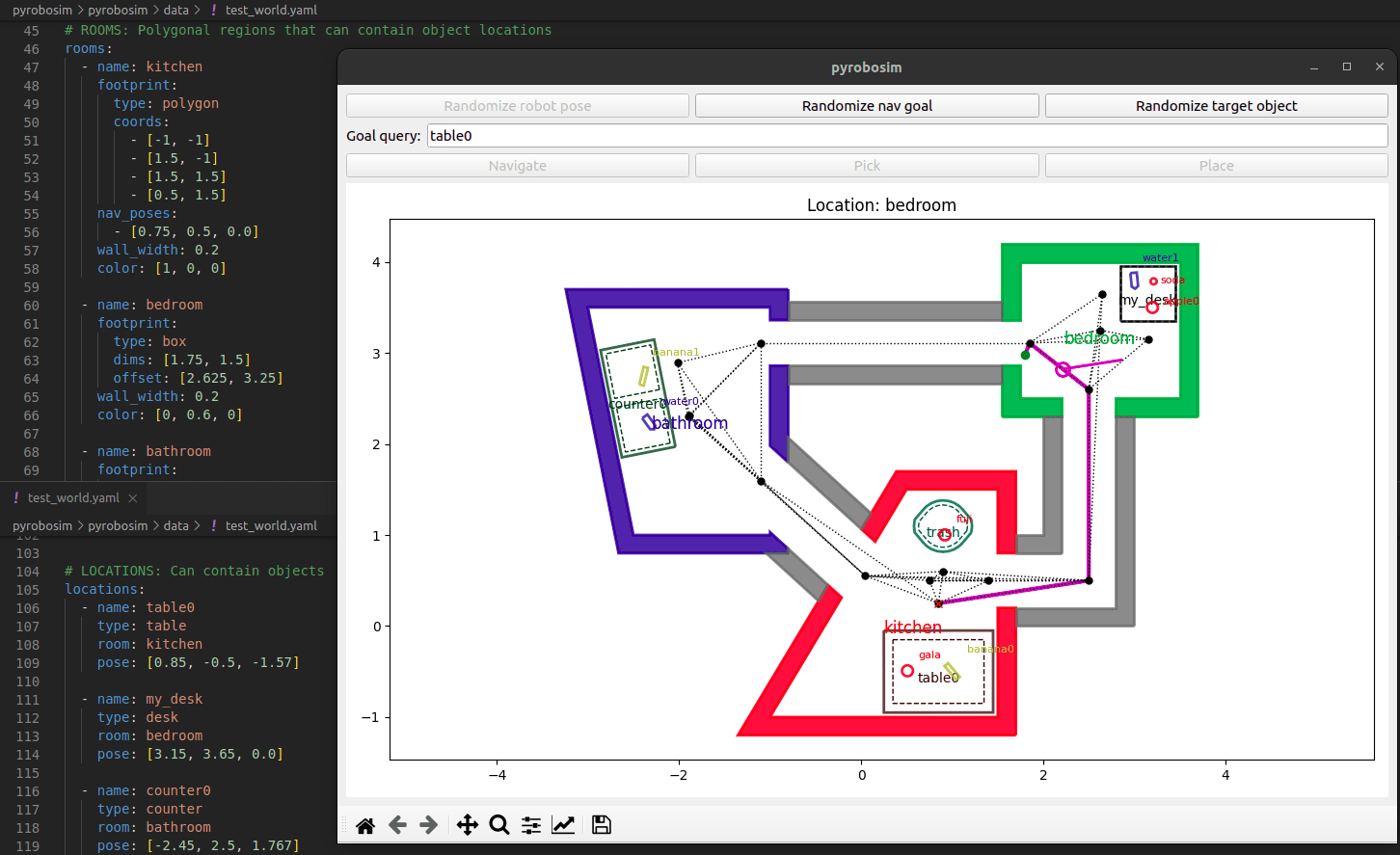
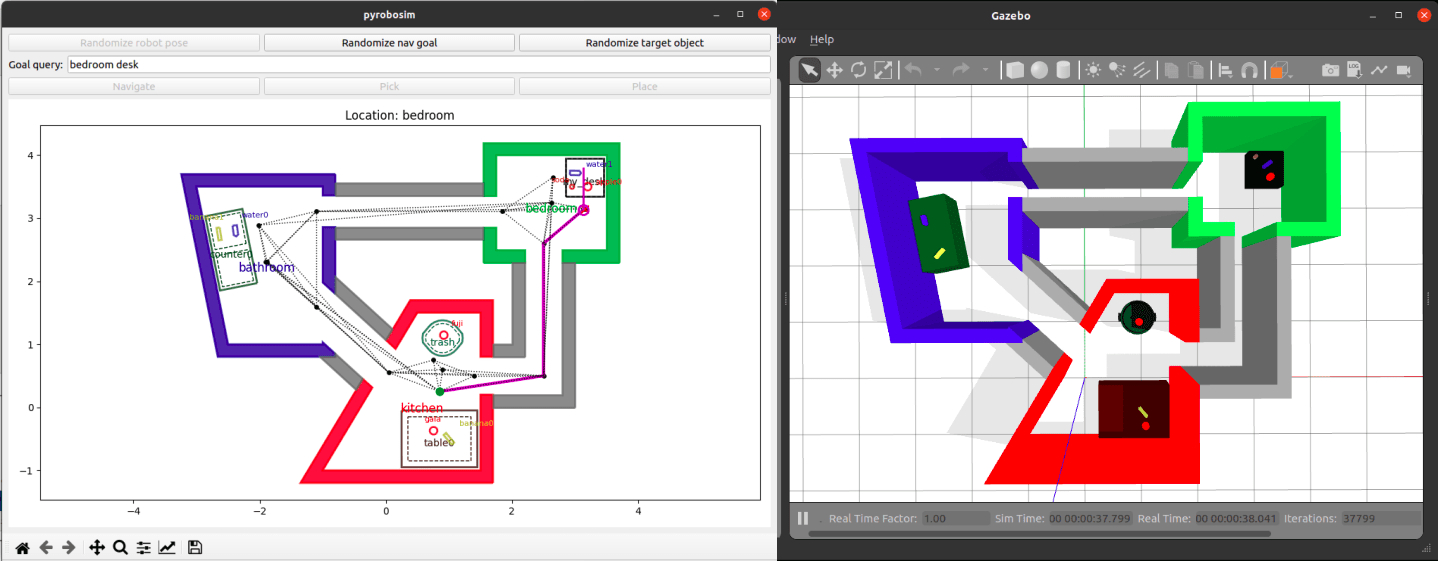
pyrobosim GUI with snippets of the world YAML file behind it.
2. Generalizing movement planning
Within the authentic software, navigation was so simple as doable as I used to be targeted on actual robotic experiments. All I wanted within the simulated world was a consultant price perform for planning that will approximate how far a robotic must journey from level A to level B.
This resulted in increase a roadmap of (recognized and manually specified) navigation poses round areas and on the heart of rooms and hallways. After you have this graph illustration of the world, you need to use a normal shortest-path search algorithm like A* to discover a path between any two factors in house.
This time round, I wished somewhat extra generality. The design has now advanced to incorporate two fashionable classes of movement planners.
- Single-query planners: Plans as soon as from the present state of the robotic to a particular aim pose. An instance is the ever-present Quickly-expanding Random Tree (RRT). Since every robotic plans from its present state, single-query planners are thought of to be properties of a person robotic in pyrobosim.
- Multi-query planners: Builds a illustration for planning which could be reused for various begin/aim configurations given the world doesn’t change. The unique hard-coded roadmap matches this invoice, in addition to the sampling-based Probabilistic Roadmap (PRM). Since a number of robots may reuse these planners by connecting begin and aim poses to an present graph, multi-query planners are thought of properties of the world itself in pyrobosim.
I additionally wished to contemplate path following algorithms sooner or later. For now, the piping is there for robots to swap out completely different path followers, however the one implementation is a “straight line executor”. This assumes the robotic is some extent that may transfer in superb straight-line trajectories. Afterward, I wish to contemplate nonholonomic constraints and allow dynamically possible planning, in addition to true path following which units the speed of the robotic inside some limits slightly than teleporting the robotic to ideally observe a given path.
Generally, there are many alternatives so as to add extra of the low-level robotic dynamics to pyrobosim, whereas proper now the main focus is basically on the higher-level conduct facet. One thing just like the MATLAB based mostly Cell Robotics Simulation Toolbox, which I labored on in a former job, has extra of this in place, so it’s actually doable!
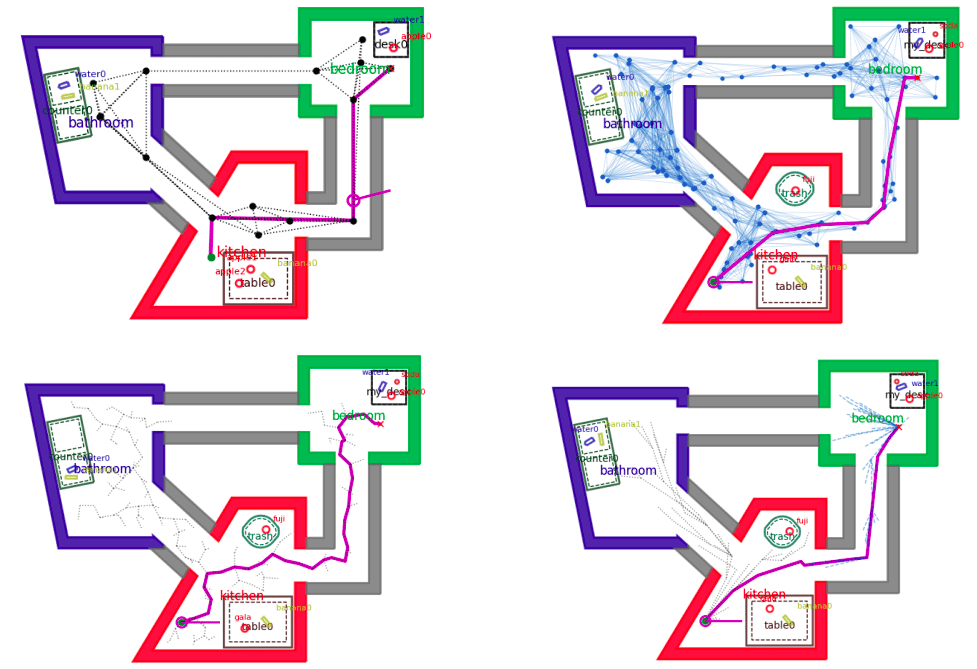
Pattern path planners in pyrobosim.
Arduous-coded roadmap (higher left), Probabilistic Roadmap (PRM) (higher proper).
Quickly-expanding Random Tree (RRT) (decrease left), Bidirectional RRT* (decrease proper).
3. Plugging into the newest ecosystem
This was in all probability essentially the most egocentric and pointless replace to the instruments. I wished to play with ROS2, so I made this right into a ROS2 package deal. Easy as that. Nonetheless, I throttled again on the selfishness sufficient to make sure that every part is also run standalone. In different phrases, I don’t wish to require anybody to make use of ROS in the event that they don’t wish to.
The ROS method does present a couple of advantages, although:
- Distributed execution: Working the world mannequin, GUI, movement planners, and many others. in a single course of is just not nice, and in reality I bumped into quite a lot of snags with multithreading earlier than I launched ROS into the combination and will cut up items into separate nodes.
- Multi-language interplay: ROS generally is good as a result of you’ll be able to have for instance Python nodes interacting with C++ nodes “without spending a dime”. I’m particularly excited for this to result in collaborations with attention-grabbing robotics instruments out within the wild.
The opposite factor that got here with this was the Gazebo world exporting, which was already obtainable within the former code. Nonetheless, there’s now a more moderen Ignition Gazebo and I wished to strive that as nicely. After discovering that polyline geometries (a key function I relied on) was not supported in Ignition, I complained simply loudly sufficient on Twitter that the lead developer of Gazebo personally let me know when she merged that PR! I used to be so excited that I put in the newest model of Ignition from supply shortly after and with a couple of tweaks to the mannequin technology we now assist each Gazebo basic and Ignition.
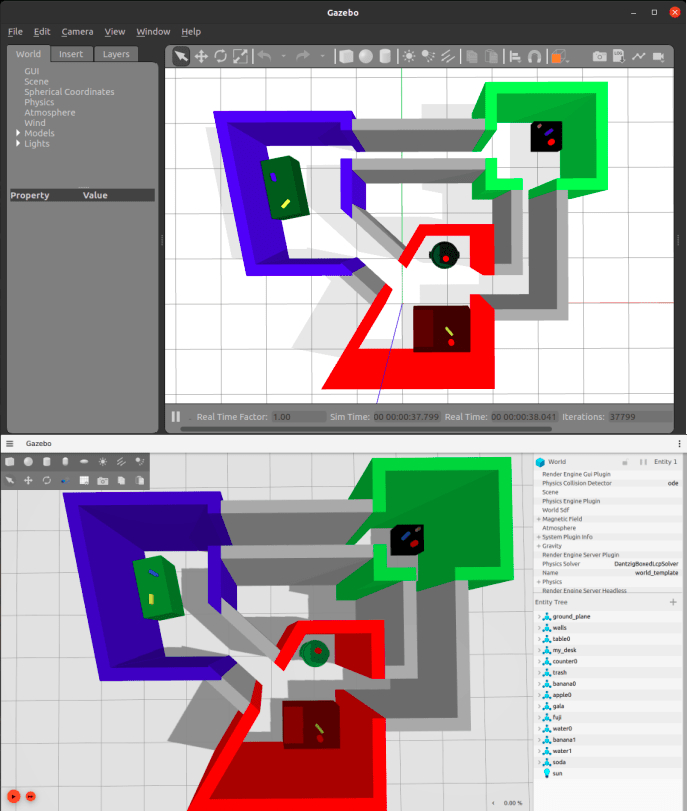
pyrobosim take a look at world exported to Gazebo basic (prime) and Ignition Gazebo (backside).
4. Software program high quality
Another issues I’ve been eager to strive for some time relate to good software program improvement practices. I’m joyful that in mentioning pyrobosim, I’ve up to now been in a position to arrange a primary Steady Integration / Steady Growth (CI/CD) pipeline and official documentation!
For CI/CD, I made a decision to check out GitHub Actions as a result of they’re tightly built-in with GitHub — and critically, compute is free for public repositories! I had previous expertise organising Jenkins (see my earlier put up), and I’ve to say that GitHub Actions was a lot simpler for this “hobbyist” workflow since I didn’t have to determine the place and host the CI server itself.
Documentation was one other factor I used to be deliberate about on this redesign. I used to be all the time impressed once I went into some open-source package deal and located professional-looking documentation with examples, tutorials, and a full API reference. So I appeared round and converged on Sphinx which generates the HTML documentation, and comes with an autodoc module that may robotically convert Python docstrings to an API reference. I then used ReadTheDocs which hosts the documentation on-line (once more, without spending a dime) and robotically rebuilds it once you push to your GitHub repository. The ultimate consequence was this pyrobosim documentation web page.
The consequence could be very satisfying, although I need to admit that my unit assessments are… missing in the meanwhile. Nonetheless, it needs to be tremendous straightforward so as to add new assessments into the present CI/CD pipeline now that each one the infrastructure is in place! And so, the technical debt continues increase.
pyrobosim GitHub repo with fairly standing badges (left) and automatic checks in a pull request (proper).
Conclusion / Subsequent steps
This has been an introduction to pyrobosim — each its design philosophy, and the important thing function units I labored on to take the code out of its authentic type and right into a standalone package deal (hopefully?) worthy of public utilization. For extra info, check out the GitHub repository and the official documentation.
Right here is my brief checklist of future concepts, which is on no account full:
- Enhancing the present instruments: Including extra unit assessments, examples, documentation, and customarily something that makes the pyrobosim a greater expertise for builders and customers alike.
- Increase the navigation stack: I’m significantly curious about dynamically possible planners for nonholonomic automobiles. There are many nice instruments on the market to tug from, resembling Peter Corke’s Robotics Toolbox for Python and Atsushi Sakai’s PythonRobotics.
- Including a conduct layer: Proper now, a plan consists of a easy sequence of actions. It’s not very reactive or modular. That is the place abstractions resembling finite-state machines and conduct bushes could be nice to usher in.
- Increasing to multi-agent and/or partially-observable techniques: Two attention-grabbing instructions that will require main function improvement.
- Collaborating with the neighborhood!
It could be improbable to work with a few of you on pyrobosim. Whether or not you could have suggestions on the design itself, particular bug stories, or the power to develop new examples or options, I’d respect any type of enter. If you find yourself utilizing pyrobosim on your work, I’d be thrilled so as to add your challenge to the checklist of utilization examples!
Lastly: I’m presently within the technique of organising job and movement planning with pyrobosim. Keep tuned for that follow-on put up, which can have plenty of cool examples.
You may learn the unique article at Roboticseabass.com.

Sebastian Castro
is a Senior Robotics Engineer at PickNik.
{kind=link}