
|
Hearken to this text  |
Researchers on the Massachusetts Institute of Know-how (MIT) Middle for Bits and Atoms (CBA) have created assembling robots which might be made up of the identical elements they use to construct buildings, and that may transfer independently in giant numbers to make these buildings.
The most recent analysis, printed in Nature Communications Engineering, brings the researchers nearer to creating a completely autonomous, self-replicating robotic meeting system able to assembling bigger buildings and planning its building sequence.
MIT’s CBA has labored for years on related analysis, like research which have demonstrated that objects like a deformable airplane wing and a purposeful racing automotive will be assembled from small, light-weight, similar items. This group’s analysis builds on that earlier work and signifies that these small subunits of robots can be utilized to perform large-scale assemblies shortly.
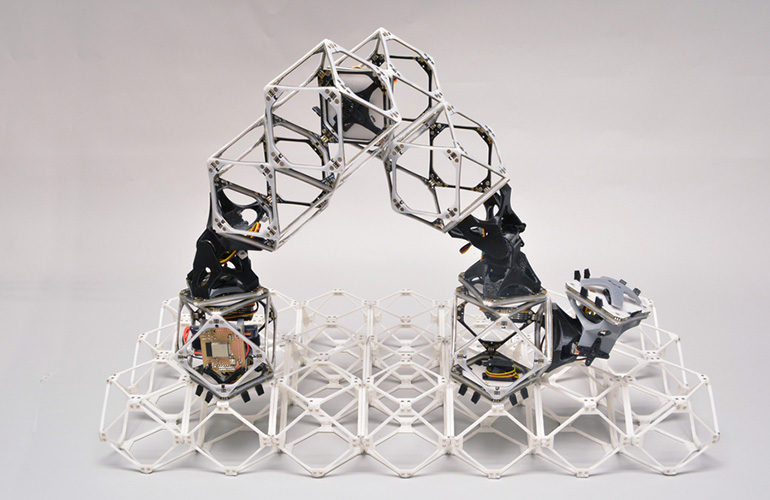
The system developed by the group consists of giant, usable buildings comprised of tiny, similar subunits known as voxels, that are the volumetric equal of a 2D pixel. MIT’s voxels are extra advanced than those utilized in earlier research, as they’ll carry each energy and knowledge from one unit to the subsequent. The construction is assembled by robots which might be additionally made up of a string of voxels joined end-to-end.
The voxel-robot can seize particular person voxels utilizing attachment factors on its finish. It then travels utilizing inchworm-like actions to a place the place it might connect the voxel to the construction and launch it. However the robotic doesn’t simply resolve methods to construct the construction, it might additionally resolve to construct extra robots to assist it construct extra shortly, or to make itself greater in order that it might journey throughout the construction quicker.
That is the place issues get sophisticated for the researchers. Whereas many papers have been printed on robotic path planning, that analysis doesn’t consider a robotic that might resolve to make extra robots.
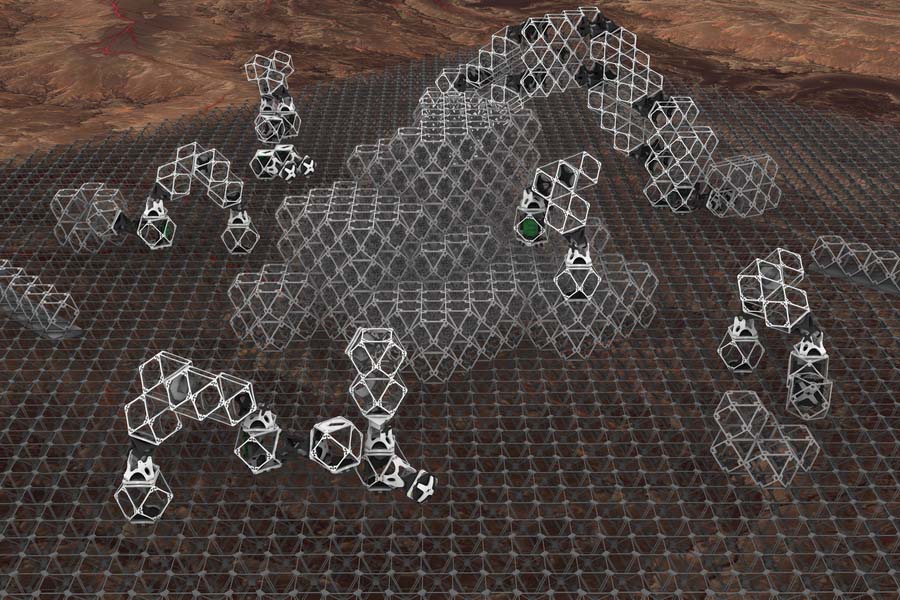
MIT’s analysis brings us nearer to the opportunity of constructing giant buildings from these meeting robots. | Supply: MIT
The MIT group engaged on the analysis plans to develop stronger connectors for the robots sooner or later. Proper now, the subunits aren’t sturdy sufficient to bear heavy hundreds, one thing that will probably be vital for the various potential use instances they see for the know-how. A few of these use instances embrace constructing 3D-printed homes and buildings for coastal safety in opposition to erosion and sea degree rise, in addition to within the automotive and aviation industries.
The analysis group included MIT-CBA doctoral scholar Amira Abdel, Rahman, professor and CBA Director Neil Gershenfeld, MIT-CBA scholar Benjamin Jenett and Christopher Cameron, a researcher on the U.S. Military Analysis Lab, amongst others.
This type of know-how might be notably useful in house journey, the place they might be despatched to different planets to construct buildings earlier than people ever arrive. That is the imaginative and prescient of the COLMENA Challenge, or “hive” in English. This challenge includes sending a swarm of 5 self-organized robots, every weighing lower than 60 grams and measuring simply 12 centimeters in diameter, every outfitted with a small photo voltaic panel.
The robots will autonomously navigate themselves to realize electrical connectivity by becoming a member of their panels collectively to make a bigger photo voltaic panel. The challenge will reveal how possible it might be to construct buildings on planetary surfaces with robotic swarms. Throughout the mission, the robots can even take the first-ever lunar plasma temperature, electromagnetic and regolith particle dimension measurements.
The challenge, led by Dr. Gustavo Medina Tanco from the Nationwide Autonomous College of Mexico (UNAM), will launch the 5 micro-robots to the moon this yr on board the Peregrine Lunar Lander.
{kind=link}