

|
Hearken to this text  |
Google DeeMind launched RoboCat, a self-improving AI agent for robotics, in its newest paper. RoboCat can be taught to carry out quite a lot of duties throughout totally different robotic arms after which self-generate new coaching information to higher enhance its method.
Sometimes, robots are programmed to carry out one particular activity or a couple of duties properly, however current advances in AI are opening doorways to robots having the ability to be taught quite a lot of duties.
Google has beforehand finished analysis exploring find out how to develop robots that may be taught to multitask at scale and find out how to mix the understanding of language fashions with the real-world capabilities of a helper robotic. However RoboCat goals to transcend these capabilities. This newest AI agent goals to unravel and adapt to a number of duties and accomplish that throughout totally different, actual robots.
Google mentioned RoboCat can decide up a brand new activity with as few as 100 demonstrations as a result of it attracts from a big and numerous dataset. The agent relies on Google’s multimodal mannequin Gato (Spanish for “cat”), which processes language, pictures, and actions in each simulated and bodily environments.
DeepMind researchers mixed Gato’s structure with a big coaching dataset of sequences of pictures and actions from numerous robotic arms, fixing tons of of various duties. To be taught duties, RoboCat would do a spherical of coaching, after which be launched right into a “self-improvement” coaching cycle with a set of beforehand unseen duties.
RoboCat discovered every new activity by following 5 steps:
- First, the analysis crew would acquire anyplace from 100 to 1,000 demonstrations of a brand new activity utilizing a robotic arm managed by a human.
- The researchers would fine-tune RoboCat on this new activity and arm, making a specialised spin-off agent.
- The spin-off agent then practices this new activity a mean of 10,000 instances, producing extra coaching information for RoboCat.
- The system incorporates the unique information and self-generated information into RoboCat’s present coaching dataset.
- The crew trains a brand new model of RoboCat on the brand new coaching dataset.
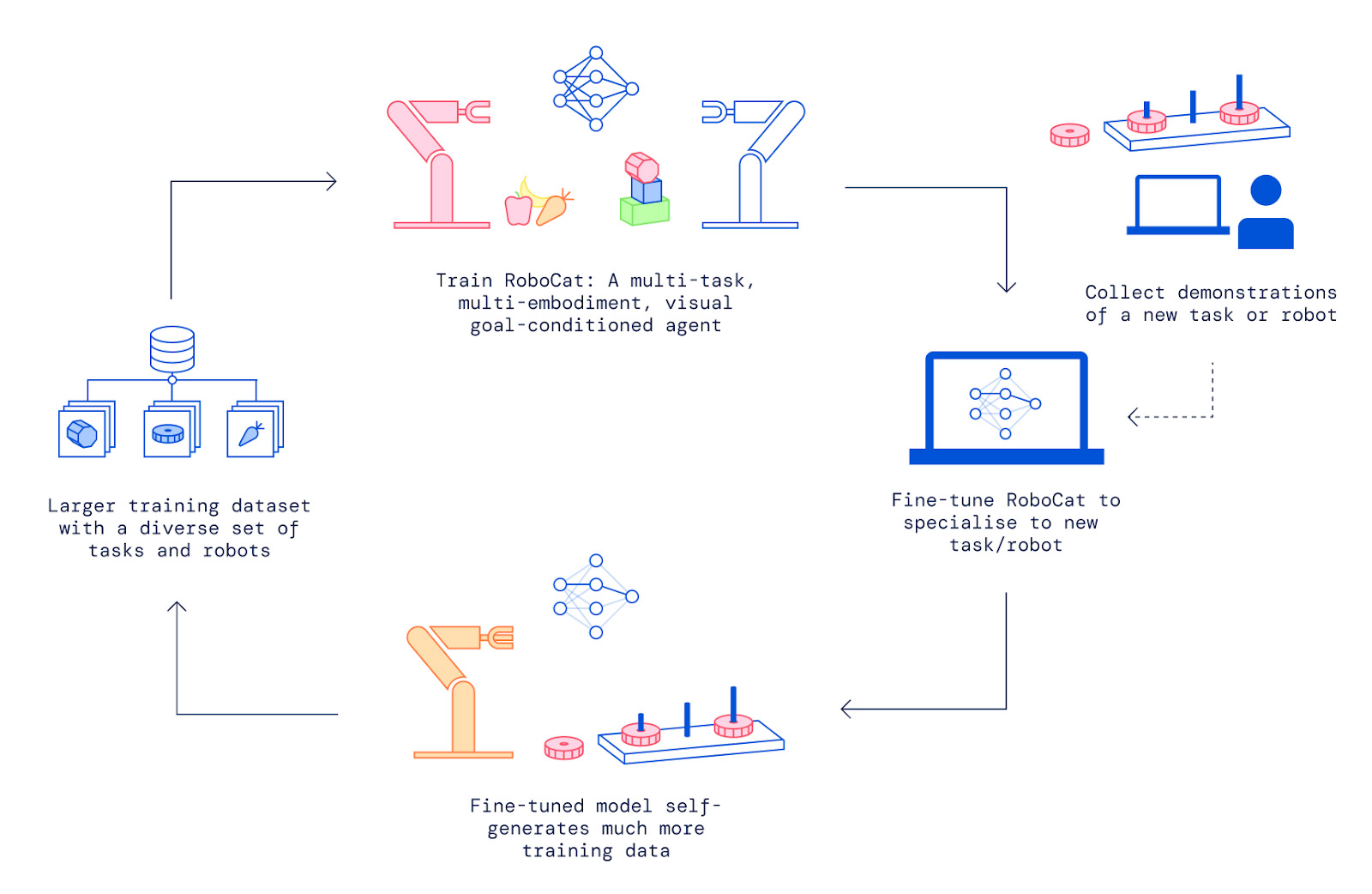
An illustration of RoboCat’s coaching cycle. | Supply: Google DeepMind
All of this coaching ends in the newest RoboCat having hundreds of thousands of trajectories, from each actual and simulated arms, to be taught from. Google used 4 several types of robots and many various robotic arms to gather vision-based information representing the duties RoboCat might be educated to carry out.
This huge and numerous coaching implies that RoboCat discovered to function totally different robotic arms inside just some hours. It was additionally in a position to lengthen these expertise to new duties rapidly. For instance, whereas RoboCat had been educated on arms with two-pronged grippers, it was in a position to adapt to a extra complicated arm with a three-fingered gripper and twice as many controllable inputs.
After observing 1,000 human-controlled demonstrations, which took simply hours to gather, RoboCat might direct this arm with a three-pronged gripper dexterously sufficient to select up gears efficiently 86% of the time.
With the identical variety of demonstrations, RoboCat might additionally adapt to unravel duties that mix precision and understanding, like eradicating a particular fruit from a bowl and fixing a shape-matching puzzle.
RoboCat solely will get higher at including extra duties the extra duties it learns. The primary model of RoboCat that DeepMind created was solely in a position to full beforehand unseen duties 36% of the time after studying from 500 demonstrations per activity. Whereas the ultimate model of RoboCat mentioned within the paper greater than doubled this success charge.
{kind=link}