

Inside our lifetimes, we are going to see robotic applied sciences that may assist with on a regular basis actions, enhancing human productiveness and high quality of life. Earlier than robotics could be broadly helpful in serving to with sensible day-to-day duties in people-centered areas — areas designed for folks, not machines — they want to have the ability to safely & competently present help to folks.
In 2022, we centered on challenges that include enabling robots to be extra useful to folks: 1) permitting robots and people to speak extra effectively and naturally; 2) enabling robots to know and apply frequent sense data in real-world conditions; and three) scaling the variety of low-level abilities robots have to successfully carry out duties in unstructured environments.
An undercurrent this previous yr has been the exploration of how giant, generalist fashions, like PaLM, can work alongside different approaches to floor capabilities permitting robots to be taught from a breadth of human data and permitting folks to interact with robots extra naturally. As we do that, we’re remodeling robotic studying right into a scalable knowledge downside in order that we are able to scale studying of generalized low-level abilities, like manipulation. On this weblog put up, we’ll evaluation key learnings and themes from our explorations in 2022.
Bringing the capabilities of LLMs to robotics
An unbelievable function of enormous language fashions (LLMs) is their potential to encode descriptions and context right into a format that’s comprehensible by each folks and machines. When utilized to robotics, LLMs let folks job robots extra simply — simply by asking — with pure language. When mixed with imaginative and prescient fashions and robotics studying approaches, LLMs give robots a solution to perceive the context of an individual’s request and make choices about what actions must be taken to finish it.
One of many underlying ideas is utilizing LLMs to immediate different pretrained fashions for data that may construct context about what is going on in a scene and make predictions about multimodal duties. That is much like the socratic methodology in instructing, the place a trainer asks college students questions to steer them by means of a rational thought course of. In “Socratic Fashions”, we confirmed that this method can obtain state-of-the-art efficiency in zero-shot picture captioning and video-to-text retrieval duties. It additionally permits new capabilities, like answering free-form questions on and predicting future exercise from video, multimodal assistive dialogue, and as we’ll talk about subsequent, robotic notion and planning.
In “In the direction of Useful Robots: Grounding Language in Robotic Affordances”, we partnered with On a regular basis Robots to floor the PaLM language mannequin in a robotics affordance mannequin to plan lengthy horizon duties. In earlier machine-learned approaches, robots have been restricted to quick, hard-coded instructions, like “Decide up the sponge,” as a result of they struggled with reasoning in regards to the steps wanted to finish a job — which is even tougher when the duty is given as an summary purpose like, “Are you able to assist clear up this spill?”
| With PaLM-SayCan, the robotic acts because the language mannequin’s “arms and eyes,” whereas the language mannequin provides high-level semantic data in regards to the job. |
For this method to work, one must have each an LLM that may predict the sequence of steps to finish lengthy horizon duties and an affordance mannequin representing the abilities a robotic can truly do in a given state of affairs. In “Extracting Ability-Centric State Abstractions from Worth Capabilities”, we confirmed that the worth operate in reinforcement studying (RL) fashions can be utilized to construct the affordance mannequin — an summary illustration of the actions a robotic can carry out underneath totally different states. This lets us join long-horizons of real-world duties, like “tidy the lounge”, to the short-horizon abilities wanted to finish the duty, like appropriately selecting, putting, and arranging gadgets.
Having each an LLM and an affordance mannequin doesn’t imply that the robotic will truly be capable of full the duty efficiently. Nonetheless, with Internal Monologue, we closed the loop on LLM-based job planning with different sources of data, like human suggestions or scene understanding, to detect when the robotic fails to finish the duty appropriately. Utilizing a robotic from On a regular basis Robots, we present that LLMs can successfully replan if the present or earlier plan steps failed, permitting the robotic to get better from failures and full advanced duties like “Put a coke within the high drawer,” as proven within the video beneath.
| With PaLM-SayCan, the robotic acts because the language mannequin’s “arms and eyes,” whereas the language mannequin provides high-level semantic data in regards to the job. |
An emergent functionality from closing the loop on LLM-based job planning that we noticed with Internal Monologue is that the robotic can react to modifications within the high-level purpose mid-task. For instance, an individual would possibly inform the robotic to alter its habits as it’s occurring, by providing fast corrections or redirecting the robotic to a different job. This habits is very helpful to let folks interactively management and customise robotic duties when robots are working close to folks.
Whereas pure language makes it simpler for folks to specify and modify robotic duties, one of many challenges is having the ability to react in actual time to the complete vocabulary folks can use to explain duties {that a} robotic is able to doing. In “Speaking to Robots in Actual Time”, we demonstrated a large-scale imitation studying framework for producing real-time, open-vocabulary, language-conditionable robots. With one coverage we have been in a position to handle over 87,000 distinctive directions, with an estimated common success charge of 93.5%. As a part of this undertaking, we launched Language-Desk, the biggest obtainable language-annotated robotic dataset, which we hope will drive additional analysis centered on real-time language-controllable robots.
 |
| Examples of lengthy horizon targets reached underneath actual time human language steerage. |
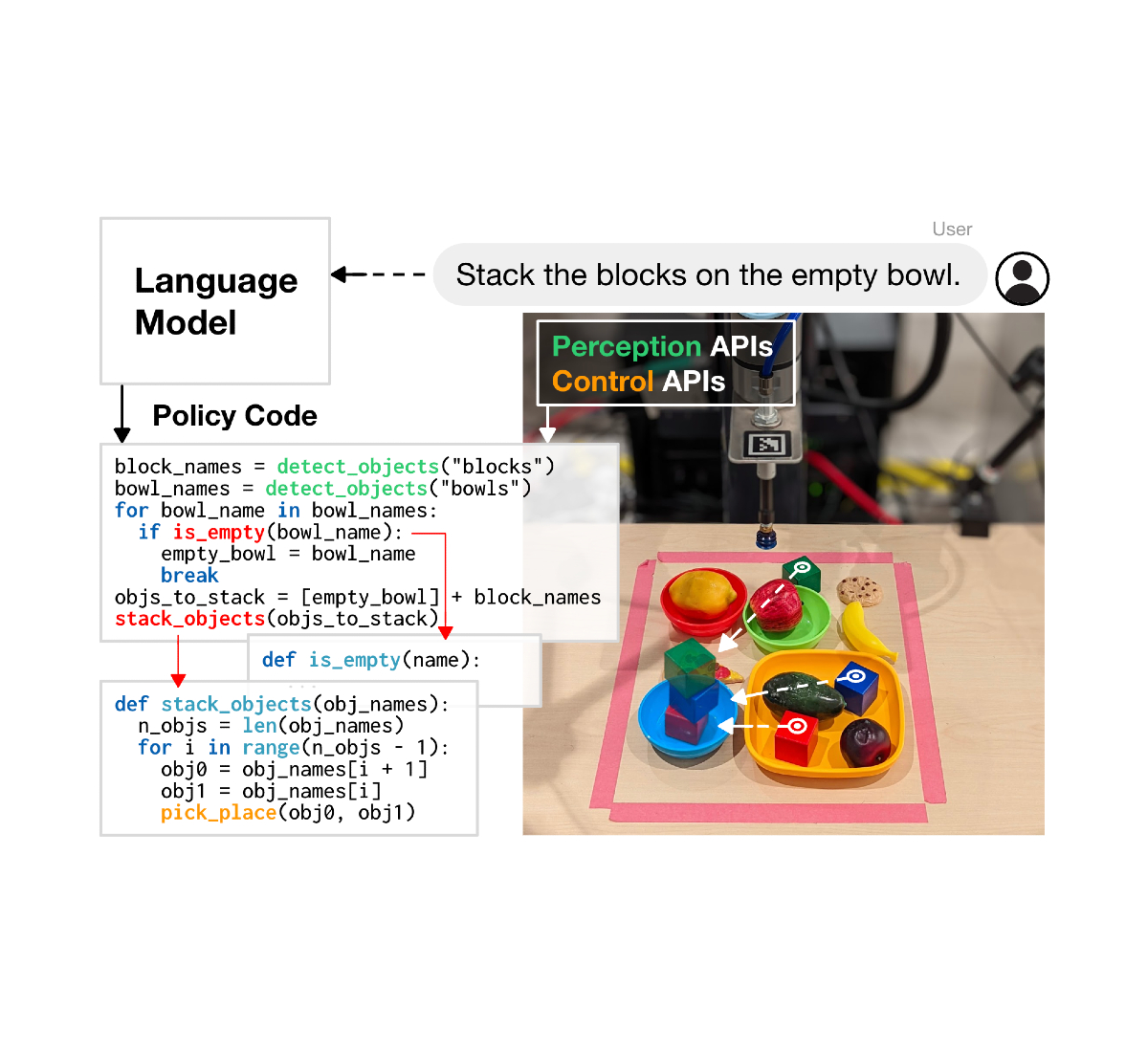
We’re additionally excited in regards to the potential for LLMs to put in writing code that may management robotic actions. Code-writing approaches, like in “Robots That Write Their Personal Code”, present promise in rising the complexity of duties robots can full by autonomously producing new code that re-composes API calls, synthesizes new features, and expresses suggestions loops to assemble new behaviors at runtime.
 |
| Code as Insurance policies makes use of code-writing language fashions to map pure language directions to robotic code to finish duties. Generated code can name current notion motion APIs, third get together libraries, or write new features at runtime. |
Turning robotic studying right into a scalable knowledge downside
Giant language and multimodal fashions assist robots perceive the context wherein they’re working, like what’s occurring in a scene and what the robotic is anticipated to do. However robots additionally want low-level bodily abilities to finish duties within the bodily world, like selecting up and exactly putting objects.
Whereas we frequently take these bodily abilities without any consideration, executing them a whole lot of occasions on daily basis with out even considering, they current important challenges to robots. For instance, to choose up an object, the robotic must understand and perceive the atmosphere, motive in regards to the spatial relation and phone dynamics between its gripper and the thing, actuate the excessive degrees-of-freedom arm exactly, and exert the correct quantity of power to stably grasp the thing with out breaking it. The problem of studying these low-level abilities is called Moravec’s paradox: reasoning requires little or no computation, however sensorimotor and notion abilities require monumental computational sources.
Impressed by the latest success of LLMs, which exhibits that the generalization and efficiency of enormous Transformer-based fashions scale with the quantity of knowledge, we’re taking a data-driven method, turning the issue of studying low-level bodily abilities right into a scalable knowledge downside. With Robotics Transformer-1 (RT-1), we educated a robotic manipulation coverage on a large-scale, real-world robotics dataset of 130k episodes that cowl 700+ duties utilizing a fleet of 13 robots from On a regular basis Robots and confirmed the identical pattern for robotics — rising the dimensions and variety of knowledge improves the mannequin potential to generalize to new duties, environments, and objects.
 |
| Instance PaLM-SayCan-RT1 executions of long-horizon duties in actual kitchens. |
Behind each language fashions and lots of of our robotics studying approaches, like RT-1, are Transformers, which permit fashions to make sense of Web-scale knowledge. Not like LLMs, robotics is challenged by multimodal representations of regularly altering environments and restricted compute. In 2020, we launched Performers as an method to make Transformers extra computationally environment friendly, which has implications for a lot of purposes past robotics. In Performer-MPC, we utilized this to introduce a brand new class of implicit management insurance policies combining the advantages of imitation studying with the strong dealing with of system constraints from Mannequin Predictive Management (MPC). We present a >40% enchancment on the robotic reaching its purpose and a >65% enchancment on social metrics when navigating round people compared to a normal MPC coverage. Performer-MPC supplies 8 ms latency for the 8.3M parameter mannequin, making on-robot deployment of Transformers sensible.
 |
| Navigation robotic maneuvering by means of extremely constrained areas utilizing: Common MPC, Express Coverage, and Performer-MPC. |
Within the final yr, our workforce has proven that data-driven approaches are typically relevant on totally different robotic platforms in various environments to be taught a variety of duties, together with cell manipulation, navigation, locomotion and desk tennis. This exhibits us a transparent path ahead for studying low-level robotic abilities: scalable knowledge assortment. Not like video and textual content knowledge that’s plentiful on the Web, robotic knowledge is extraordinarily scarce and arduous to accumulate. Discovering approaches to gather and effectively use wealthy datasets consultant of real-world interactions is the important thing for our data-driven approaches.
Simulation is a quick, secure, and simply parallelizable choice, however it’s troublesome to copy the complete atmosphere, particularly physics and human-robot interactions, in simulation. In i-Sim2Real, we confirmed an method to deal with the sim-to-real hole and be taught to play desk tennis with a human opponent by bootstrapping from a easy mannequin of human habits and alternating between coaching in simulation and deploying in the true world. In every iteration, each the human habits mannequin and the coverage are refined.
 |
| Studying to play desk tennis with a human opponent. |
Whereas simulation helps, gathering knowledge in the true world is important for fine-tuning simulation insurance policies or adapting current insurance policies in new environments. Whereas studying, robots are liable to failure, which may trigger injury to itself and environment — particularly within the early phases of studying the place they’re exploring how one can work together with the world. We have to acquire coaching knowledge safely, even whereas the robotic is studying, and allow the robotic to autonomously get better from failure. In “Studying Locomotion Abilities Safely within the Actual World”, we launched a secure RL framework that switches between a “learner coverage” optimized to carry out the specified job and a “secure restoration coverage” that forestalls the robotic from unsafe states. In “Legged Robots that Carry on Studying”, we educated a reset coverage so the robotic can get better from failures, like studying to face up by itself after falling.
| Automated reset insurance policies allow the robotic to proceed studying in a lifelong trend with out human supervision. |
Whereas robotic knowledge is scarce, movies of individuals performing totally different duties are plentiful. After all, robots aren’t constructed like folks — so the thought of robotic studying from folks raises the issue of transferring studying throughout totally different embodiments. In “Robotic See, Robotic Do”, we developed Cross-Embodiment Inverse Reinforcement Studying to be taught new duties by watching folks. As a substitute of attempting to copy the duty precisely as an individual would, we be taught the high-level job goal, and summarize that data within the type of a reward operate. This kind of demonstration studying may permit robots to be taught abilities by watching movies available on the web.
We’re additionally progressing in the direction of making our studying algorithms extra knowledge environment friendly in order that we’re not relying solely on scaling knowledge assortment. We improved the effectivity of RL approaches by incorporating prior data, together with predictive data, adversarial movement priors, and information insurance policies. Additional enhancements are gained by using a novel structured dynamical methods structure and combining RL with trajectory optimization, supported by novel solvers. All these prior data helped alleviate the exploration challenges, served nearly as good regularizers, and considerably lowered the quantity of knowledge required. Moreover, our workforce has invested closely in additional data-efficient imitation studying. We confirmed {that a} easy imitation studying method, BC-Z, can allow zero-shot generalization to new duties that weren’t seen throughout coaching. We additionally launched an iterative imitation studying algorithm, GoalsEye, which mixed Studying from Play and Objective-Conditioned Conduct Cloning for high-speed and high-precision desk tennis video games. On the theoretical entrance, we investigated dynamical-systems stability for characterizing the pattern complexity of imitation studying, and the function of capturing failure-and-recovery inside demonstration knowledge to higher situation offline studying from smaller datasets.
Closing
Advances in giant fashions throughout the sector of AI have spurred a leap in capabilities for robotic studying. This previous yr, we’ve seen the sense of context and sequencing of occasions captured in LLMs assist clear up long-horizon planning for robotics and make robots simpler for folks to work together with and job. We’ve additionally seen a scalable path to studying strong and generalizable robotic behaviors by making use of a transformer mannequin structure to robotic studying. We proceed to open supply knowledge units, like “Scanned Objects: A Dataset of 3D-Scanned Frequent Family Objects”, and fashions, like RT-1, within the spirit of taking part within the broader analysis neighborhood. We’re enthusiastic about constructing on these analysis themes within the coming yr to allow useful robots.
Acknowledgements
We want to thank everybody who supported our analysis. This consists of the complete Robotics at Google workforce, and collaborators from On a regular basis Robots and Google Analysis. We additionally wish to thank our exterior collaborators, together with UC Berkeley, Stanford, Gatech, College of Washington, MIT, CMU and U Penn.
Google Analysis, 2022 & past
This was the sixth weblog put up within the “Google Analysis, 2022 & Past” sequence. Different posts on this sequence are listed within the desk beneath:
| * Articles might be linked as they’re launched. |
{kind=link}