

A standard method used to manage robots is to program them with code to detect objects, sequencing instructions to maneuver actuators, and suggestions loops to specify how the robotic ought to carry out a process. Whereas these applications may be expressive, re-programming insurance policies for every new process may be time consuming, and requires area experience.
What if when given directions from folks, robots might autonomously write their very own code to work together with the world? It seems that the newest technology of language fashions, comparable to PaLM, are able to advanced reasoning and have additionally been skilled on hundreds of thousands of traces of code. Given pure language directions, present language fashions are extremely proficient at writing not solely generic code however, as we’ve found, code that may management robotic actions as effectively. When supplied with a number of instance directions (formatted as feedback) paired with corresponding code (through in-context studying), language fashions can soak up new directions and autonomously generate new code that re-composes API calls, synthesizes new capabilities, and expresses suggestions loops to assemble new behaviors at runtime. Extra broadly, this means another method to utilizing machine studying for robots that (i) pursues generalization by means of modularity and (ii) leverages the abundance of open-source code and knowledge obtainable on the Web.
 |
| Given code for an instance process (left), language fashions can re-compose API calls to assemble new robotic behaviors for brand spanking new duties (proper) that use the identical capabilities however in several methods. |
To discover this chance, we developed Code as Insurance policies (CaP), a robot-centric formulation of language model-generated applications executed on bodily programs. CaP extends our prior work, PaLM-SayCan, by enabling language fashions to finish much more advanced robotic duties with the complete expression of general-purpose Python code. With CaP, we suggest utilizing language fashions to instantly write robotic code by means of few-shot prompting. Our experiments display that outputting code led to improved generalization and process efficiency over instantly studying robotic duties and outputting pure language actions. CaP permits a single system to carry out quite a lot of advanced and different robotic duties with out task-specific coaching.
A Completely different Option to Take into consideration Robotic Generalization
To generate code for a brand new process given pure language directions, CaP makes use of a code-writing language mannequin that, when prompted with hints (i.e., import statements that inform which APIs can be found) and examples (instruction-to-code pairs that current few-shot “demonstrations” of how directions needs to be transformed into code), writes new code for brand spanking new directions. Central to this method is hierarchical code technology, which prompts language fashions to recursively outline new capabilities, accumulate their very own libraries over time, and self-architect a dynamic codebase. Hierarchical code technology improves state-of-the-art on each robotics in addition to customary code-gen benchmarks in pure language processing (NLP) subfields, with 39.8% move@1 on HumanEval, a benchmark of hand-written coding issues used to measure the useful correctness of synthesized applications.
Code-writing language fashions can categorical quite a lot of arithmetic operations and suggestions loops grounded in language. Pythonic language mannequin applications can use traditional logic buildings, e.g., sequences, choice (if/else), and loops (for/whereas), to assemble new behaviors at runtime. They’ll additionally use third-party libraries to interpolate factors (NumPy), analyze and generate shapes (Shapely) for spatial-geometric reasoning, and so forth. These fashions not solely generalize to new directions, however they’ll additionally translate exact values (e.g., velocities) to ambiguous descriptions (“sooner” and “to the left”) relying on the context to elicit behavioral commonsense.
 |
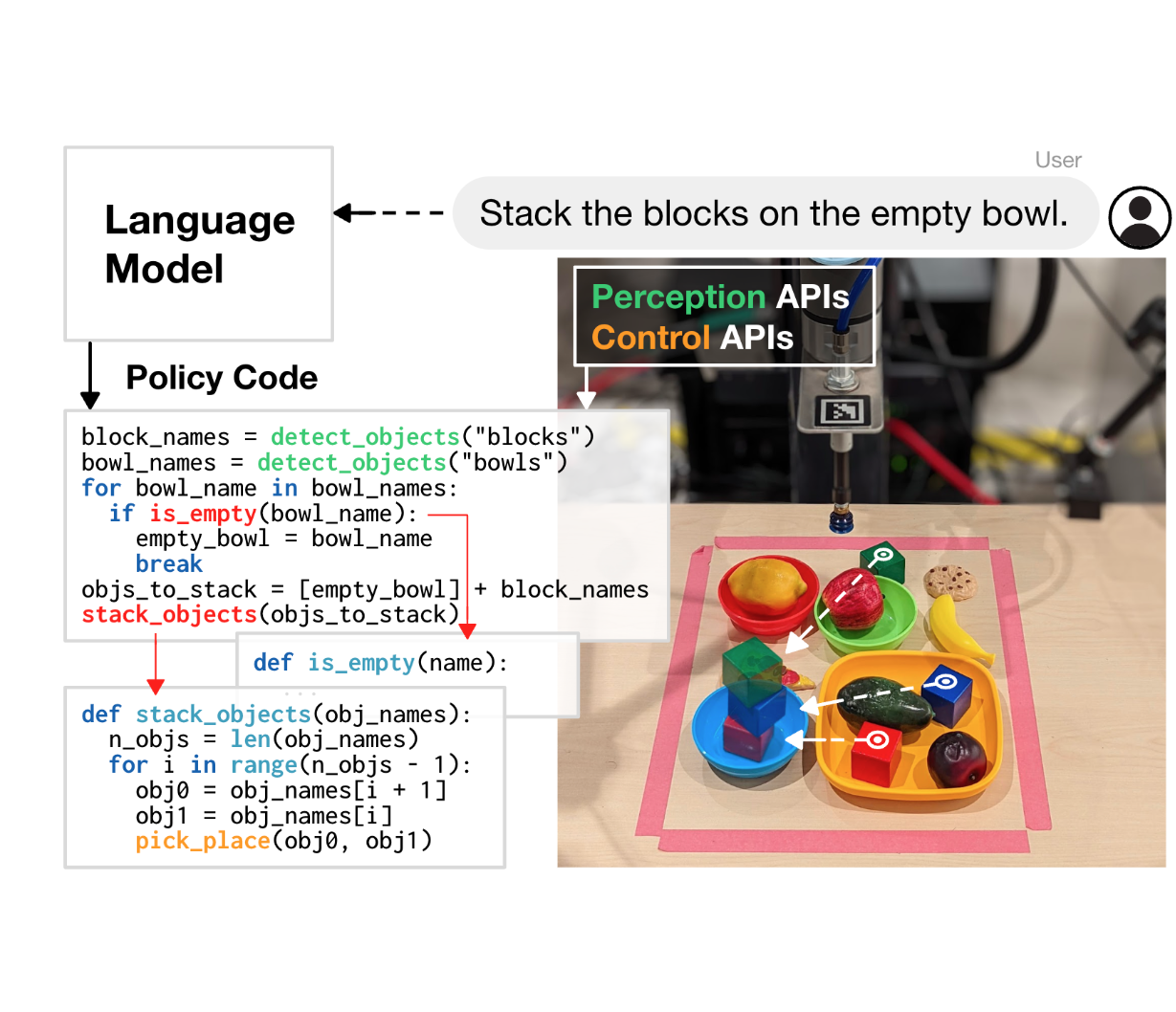
| Code as Insurance policies makes use of code-writing language fashions to map pure language directions to robotic code to finish duties. Generated code can name current notion motion APIs, third social gathering libraries, or write new capabilities at runtime. |
CaP generalizes at a selected layer within the robotic: decoding pure language directions, processing notion outputs (e.g., from off-the-shelf object detectors), after which parameterizing management primitives. This matches into programs with factorized notion and management, and imparts a level of generalization (acquired from pre-trained language fashions) with out the magnitude of information assortment wanted for end-to-end robotic studying. CaP additionally inherits language mannequin capabilities which might be unrelated to code writing, comparable to supporting directions with non-English languages and emojis.
 |
| CaP inherits the capabilities of language fashions, comparable to multilingual and emoji assist. |
By characterizing the sorts of generalization encountered in code technology issues, we will additionally examine how hierarchical code technology improves generalization. For instance, “systematicity” evaluates the power to recombine identified elements to kind new sequences, “substitutivity” evaluates robustness to synonymous code snippets, whereas “productiveness” evaluates the power to jot down coverage code longer than these seen within the examples (e.g., for brand spanking new lengthy horizon duties which will require defining and nesting new capabilities). Our paper presents a brand new open-source benchmark to judge language fashions on a set of robotics-related code technology issues. Utilizing this benchmark, we discover that, on the whole, greater fashions carry out higher throughout most metrics, and that hierarchical code technology improves “productiveness” generalization essentially the most.
 |
| Efficiency on our RoboCodeGen Benchmark throughout completely different generalization sorts. The bigger mannequin (Davinci) performs higher than the smaller mannequin (Cushman), with hierarchical code technology enhancing productiveness essentially the most. |
We’re additionally excited in regards to the potential for code-writing fashions to specific cross-embodied plans for robots with completely different morphologies that carry out the identical process in a different way relying on the obtainable APIs (notion motion areas), which is a crucial facet of any robotics basis mannequin.
 |
| Language mannequin code-generation reveals cross-embodiment capabilities, finishing the identical process in several methods relying on the obtainable APIs (that outline notion motion areas). |
Limitations
Code as insurance policies right now are restricted by the scope of (i) what the notion APIs can describe (e.g., few visual-language fashions up to now can describe whether or not a trajectory is “bumpy” or “extra C-shaped”), and (ii) which management primitives can be found. Solely a handful of named primitive parameters may be adjusted with out over-saturating the prompts. Our method additionally assumes all given directions are possible, and we can’t inform if generated code might be helpful a priori. CaPs additionally battle to interpret directions which might be considerably extra advanced or function at a special abstraction degree than the few-shot examples offered to the language mannequin prompts. Thus, for instance, within the tabletop area, it could be tough for our particular instantiation of CaPs to “construct a home with the blocks” since there aren’t any examples of constructing advanced 3D buildings. These limitations level to avenues for future work, together with extending visible language fashions to explain low-level robotic behaviors (e.g., trajectories) or combining CaPs with exploration algorithms that may autonomously add to the set of management primitives.
Open-Supply Launch
Now we have launched the code wanted to breed our experiments and an interactive simulated robotic demo on the venture web site, which additionally accommodates further real-world demos with movies and generated code.
Conclusion
Code as insurance policies is a step in direction of robots that may modify their behaviors and increase their capabilities accordingly. This may be enabling, however the flexibility additionally raises potential dangers since synthesized applications (until manually checked per runtime) might lead to unintended behaviors with bodily {hardware}. We are able to mitigate these dangers with built-in security checks that certain the management primitives that the system can entry, however extra work is required to make sure new combos of identified primitives are equally protected. We welcome broad dialogue on methods to reduce these dangers whereas maximizing the potential constructive impacts in direction of extra general-purpose robots.
Acknowledgements
This analysis was achieved by Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng. Particular due to Vikas Sindhwani, Vincent Vanhoucke for useful suggestions on writing, Chad Boodoo for operations and {hardware} assist. An early preprint is out there on arXiv.
{kind=link}